Karteesinen koordinaattijärjestelmä: peruskäsitteet ja esimerkit.
Koordinaattimenetelmä on tietysti erittäin hyvä, mutta todellisissa C2-tehtävissä ei ole koordinaatteja tai vektoreita. Siksi ne on otettava käyttöön. Kyllä, kyllä, ota se näin ja syötä se: ilmoita x-, y- ja z-akselien origo, yksikkösegmentti ja suunta.
Tämän menetelmän merkittävin ominaisuus on, että sillä ei ole väliä, kuinka tarkalleen koordinaattijärjestelmä syötetään. Jos kaikki laskelmat ovat oikein, vastaus on oikea.
Kuution koordinaatit
Jos ongelma C2 sisältää kuution, pidä itseäsi onnekas. Tämä on yksinkertaisin monitahoinen, jonka kaikki kaksitahoiset kulmat ovat 90°.
Koordinaatisto on myös erittäin helppo syöttää:
- Koordinaattien origo on pisteessä A;
- Useimmiten kuution reunaa ei ole ilmoitettu, joten otamme sen yksikkösegmenttinä;
- X-akseli on suunnattu reunaa AB pitkin, y - reunaa AD pitkin ja z-akseli - reunaa AA 1 pitkin.
Huomaa: z-akseli osoittaa ylöspäin! Kaksiulotteisen jälkeen koordinaattijärjestelmät Tämä on hieman epätavallista, mutta itse asiassa hyvin loogista.
Joten nyt jokaisella kuution kärjellä on koordinaatit. Kootaan ne taulukkoon - erikseen kuution alatasolle:
On helppo huomata, että ylemmän tason pisteet eroavat alemman tason vastaavista pisteistä vain z-koordinaatissa. Esimerkiksi B = (1; 0; 0), B1 = (1; 0; 1). Pääasia, ettei sekaannu!
Prisma on jo paljon hauskempaa. Oikealla lähestymistavalla riittää, että tiedät vain alemman kannan koordinaatit - ylempi lasketaan automaattisesti.
Tehtävät C2 koskevat yksinomaan säännöllisiä kolmioprismoja (suorat prismat, joiden pohjassa on säännöllinen kolmio). Heille koordinaattijärjestelmä otetaan käyttöön melkein samalla tavalla kuin kuutiossa. Muuten, jos joku ei tiedä, kuutio on myös prisma, vain tetraedri.
Mennään siis! Esittelemme koordinaattijärjestelmän:
- Koordinaattien origo on pisteessä A;
- Otamme prisman puolen yhtenä segmenttinä, ellei ongelmalausekkeessa toisin mainita;
- Suuntaamme x-akselin reunaa AB, z - reunaa AA 1 pitkin ja sijoitamme y-akselin siten, että OXY-taso osuu perustason ABC kanssa.
Tässä tarvitaan selvennystä. Tosiasia on, että y-akseli EI ole sama kuin reunan AC, kuten monet ihmiset uskovat. Miksi se ei vastaa? Ajattele itse: kolmio ABC on tasasivuinen, kaikki kulmat siinä ovat 60°. Ja koordinaattiakselien välisten kulmien tulee olla 90°, joten yllä oleva kuva näyttää tältä:

Toivottavasti nyt on selvää, miksi y-akseli ei kulje AC:tä pitkin. Piirretään tähän kolmioon korkeus CH. Kolmio ACH on suorakulmainen kolmio ja AC = 1, joten AH = 1 · cos A = cos 60°; CH = 1 sin A = sin 60°. Näitä seikkoja tarvitaan pisteen C koordinaattien laskemiseen.
Katsotaanpa nyt koko prismaa ja rakennettua koordinaattijärjestelmää:

Saamme seuraavat pisteiden koordinaatit:

Kuten näemme, prisman ylemmän kannan pisteet eroavat jälleen alemman vastaavista pisteistä vain z-koordinaatin verran. Suurin ongelma on pisteet C ja C 1. Heillä on irrationaaliset koordinaatit, jotka sinun tarvitsee vain muistaa. No, tai ymmärrä mistä ne tulevat.
Kuusikulmaisen prisman koordinaatit
Kuusikulmainen prisma on "kloonattu" kolmioprisma. Ymmärrät kuinka tämä tapahtuu, jos katsot alempaa kantaa - kutsutaan sitä nimellä ABCDEF. Suoritetaan lisäkonstruktiot: segmentit AD, BE ja CF. Tuloksena on kuusi kolmiota, joista jokainen (esimerkiksi kolmio ABO) on kolmioprisman perusta.

Nyt esitellään itse koordinaattijärjestelmä. Koordinaattien origo - piste O - sijoitetaan kuusikulmion ABCDEF symmetriakeskukseen. X-akseli kulkee FC:tä pitkin ja y-akseli janojen AB ja DE keskipisteiden läpi. Saamme tämän kuvan:

Huomaa: origo EI täsmää monitahoisen kärjen kanssa! Itse asiassa, kun ratkaiset todellisia ongelmia, huomaat, että tämä on erittäin kätevää, koska se voi merkittävästi vähentää laskelmien määrää.
Jäljelle jää vain z-akselin lisääminen. Perinteen mukaan piirrämme sen kohtisuoraan OXY-tasoon nähden ja suuntaamme sen pystysuunnassa ylöspäin. Saamme lopullisen kuvan:

Kirjataan nyt pisteiden koordinaatit ylös. Oletetaan, että kaikki säännöllisen kuusikulmaisen prismamme reunat ovat yhtä suuret kuin 1. Alemman kantan koordinaatit ovat siis:
Ylemmän kannan koordinaatit on siirretty yhdellä z-akselia pitkin:
Pyramidi on yleensä hyvin ankara. Analysoimme vain yksinkertaisinta tapausta - säännöllistä nelikulmaista pyramidia, jonka kaikki reunat ovat yhtä. Todellisissa C2-tehtävissä reunojen pituudet voivat kuitenkin poiketa toisistaan, joten alla on annettu yleinen koordinaattien laskentakaavio.
Siis säännöllinen nelikulmainen pyramidi. Tämä on sama kuin Cheops, vain hieman pienempi. Merkitään se SABCD, jossa S on kärki. Otetaan käyttöön koordinaattijärjestelmä: origo on pisteessä A, yksikkösegmentti AB = 1, x-akseli on suunnattu AB:tä pitkin, y-akseli on suunnattu AD:tä pitkin ja z-akseli on suunnattu ylöspäin, kohtisuorassa OXY-tasoon nähden. . Lisälaskelmia varten tarvitsemme korkeuden SH - joten rakennamme sen. Saamme seuraavan kuvan:

Etsitään nyt pisteiden koordinaatit. Katsotaanpa ensin OXY-konetta. Täällä kaikki on yksinkertaista: kanta on neliö, sen koordinaatit tunnetaan. Ongelmia syntyy pisteen S kanssa. Koska SH on korkeus OXY-tasoon, pisteet S ja H eroavat vain z-koordinaatista. Itse asiassa janan SH pituus on pisteen S z-koordinaatti, koska H = (0,5; 0,5; 0).
huomaa, että kolmiot ABC ja ASC ovat yhtä suuret kolmella sivulla (AS = CS = AB = CB = 1, ja puoli AC on yhteinen). Siksi SH = BH. Mutta BH on puolet neliön ABCD diagonaalista, ts. BH = AB sin 45°. Saamme kaikkien pisteiden koordinaatit:
Siinä kaikki pyramidin koordinaatit. Mutta ei ollenkaan koordinaateilla. Tarkastelimme vain yleisimpiä polyhedraja, mutta nämä esimerkit riittävät laskemaan itsenäisesti muiden lukujen koordinaatit. Siksi voimme itse asiassa siirtyä menetelmiin tiettyjen ongelmien C2 ratkaisemiseksi.
Määrittääksemme pisteen sijainnin avaruudessa käytämme suorakulmaisia suorakulmaisia koordinaatteja (kuva 2).
Karteesinen suorakaiteen muotoinen koordinaattijärjestelmä avaruudessa muodostuu kolmesta keskenään kohtisuorasta koordinaattiakselista OX, OY, OZ. Koordinaattiakselit leikkaavat pisteessä O, jota kutsutaan origoksi, jokaiselle akselille valitaan positiivinen suunta, joka osoitetaan nuolilla, ja mittayksikkö akseleilla oleville segmenteille. Mittayksiköt ovat yleensä (ei välttämättä) samat kaikille akseleille. OX-akselia kutsutaan abskissa-akseliksi (tai yksinkertaisesti abskissaksi), OY-akseli on ordinaatta-akseli ja OZ-akseli on sovellutusakseli.
Pisteen A sijainti avaruudessa määräytyy kolmella koordinaatilla x, y ja z. X-koordinaatti on yhtä suuri kuin janan OB pituus, y-koordinaatti on janan OC pituus, z-koordinaatti on segmentin OD pituus valituissa mittayksiköissä. Janat OB, OC ja OD määritetään tasoilla, jotka on piirretty pisteestä, joka on yhdensuuntainen tasojen YOZ, XOZ ja XOY kanssa, vastaavasti.
X-koordinaattia kutsutaan pisteen A abskissaksi, y-koordinaatiksi pisteen A ordinaatiksi ja z-koordinaatiksi pisteen A aplikaatioksi.
Symbolisesti se on kirjoitettu näin:
tai linkitä koordinaattitietue tiettyyn pisteeseen indeksin avulla:
x A , y A , z A ,

Jokaista akselia pidetään lukuviivana, eli sillä on positiivinen suunta ja negatiivisella säteellä sijaitsevat pisteet määrätään negatiiviset arvot koordinaatit (etäisyys otetaan miinusmerkillä). Eli jos esimerkiksi piste B ei sijaitse kuten kuvassa - säteellä OX, vaan sen jatkossa kääntöpuoli pisteestä O (akselin OX negatiivisella puolella), silloin pisteen A x abskissa olisi negatiivinen (miinus etäisyys OB). Samoin kahdelle muulle akselille.
Kuvassa näkyvät koordinaattiakselit OX, OY, OZ. 2, muodostavat oikeakätisen koordinaattijärjestelmän. Tämä tarkoittaa, että jos katsot YOZ-tasoa OX-akselin positiivista suuntaa pitkin, niin OY-akselin liike kohti OZ-akselia tapahtuu myötäpäivään. Tätä tilannetta voidaan kuvata gimlet-säännön avulla: jos gimlettiä (oikeanpuoleisella kierteellä varustettu ruuvi) kierretään OY-akselilta OZ-akselille, niin se liikkuu OX-akselin positiivista suuntaa pitkin.
Koordinaattiakseleita pitkin suunnattuja yksikköpituusvektoreita kutsutaan koordinaattiyksikkövektoreiksi. Ne on yleensä nimetty  (Kuva 3). Siellä on myös nimitys
(Kuva 3). Siellä on myös nimitys  Yksikkövektorit muodostavat koordinaattijärjestelmän perustan.
Yksikkövektorit muodostavat koordinaattijärjestelmän perustan.
Oikeakätisessä koordinaatistossa ovat voimassa seuraavat kaavat yksikkövektorien vektorituloilla:

Suorakaiteen muotoinen koordinaattijärjestelmä tasossa muodostuu kahdesta keskenään kohtisuorasta koordinaattiakselista X’X ja Y’Y. Koordinaattiakselit leikkaavat pisteessä O, jota kutsutaan origoksi, jokaiselle akselille valitaan positiivinen suunta.Akseleiden positiivinen suunta (oikeakätisessä koordinaatistossa) valitaan siten, että kun X'X-akselia kierretään 90° vastapäivään, sen positiivinen suunta on sama kuin Y'Y-akselin positiivinen suunta. Koordinaattiakselien X'X ja Y'Y muodostamia neljää kulmaa (I, II, III, IV) kutsutaan koordinaattikulmiksi (katso kuva 1).
Pisteen A sijainti tasossa määräytyy kahdella koordinaatilla x ja y. X-koordinaatti on yhtä suuri kuin janan OB pituus, y-koordinaatti on yhtä suuri kuin janan OC pituus valituissa mittayksiköissä. Jaksot OB ja OC määritetään viivoilla, jotka on vedetty pisteestä A yhdensuuntaisesti Y'Y- ja X'X-akselien kanssa, vastaavasti. X-koordinaattia kutsutaan pisteen A abskissaksi, y-koordinaattia pisteen A ordinaatiksi. Se kirjoitetaan seuraavasti: A(x, y).
Jos piste A on koordinaattikulmassa I, niin pisteellä A on positiivinen abskissa ja ordinaatta. Jos piste A on koordinaattikulmassa II, pisteellä A on negatiivinen abskissa ja positiivinen ordinaatta. Jos piste A on koordinaattikulmassa III, niin pisteellä A on negatiivinen abskissa ja ordinaatta. Jos piste A on koordinaattikulmassa IV, niin pisteellä A on positiivinen abskissa ja negatiivinen ordinaatta.
Suorakaiteen muotoinen koordinaattijärjestelmä avaruudessa muodostuu kolmesta keskenään kohtisuorasta koordinaattiakselista OX, OY ja OZ. Koordinaattiakselit leikkaavat pisteessä O, jota kutsutaan origoksi, jokaiselle akselille valitaan positiivinen suunta, joka osoitetaan nuolilla, ja mittayksikkö akseleilla oleville segmenteille. Mittayksiköt ovat samat kaikille akseleille. OX - abskissa-akseli, OY - ordinaatta-akseli, OZ - aplikaatioakseli. Akseleiden positiivinen suunta valitaan siten, että kun OX-akselia kierretään vastapäivään 90°, sen positiivinen suunta osuu yhteen OY-akselin positiivisen suunnan kanssa, jos tämä pyöriminen havaitaan OZ-akselin positiivisesta suunnasta. Tällaista koordinaattijärjestelmää kutsutaan oikeakätiseksi. Jos peukalo oikea käsi ota X-suunta X-suunnaksi, indeksi Y-suunnaksi ja keskimmäinen Z-suunnaksi, niin muodostuu oikeakätinen koordinaattijärjestelmä. Vasemman käden samanlaiset sormet muodostavat vasemman koordinaattijärjestelmän. On mahdotonta yhdistää oikeaa ja vasenta koordinaattijärjestelmää siten, että vastaavat akselit osuvat yhteen (ks. kuva 2).

Pisteen A sijainti avaruudessa määräytyy kolmella koordinaatilla x, y ja z. X-koordinaatti on yhtä suuri kuin janan OB pituus, y-koordinaatti on janan OC pituus, z-koordinaatti on segmentin OD pituus valituissa mittayksiköissä. Janat OB, OC ja OD määritetään tasoilla, jotka on vedetty pisteestä A yhdensuuntaisesti tasojen YOZ, XOZ ja XOY kanssa, vastaavasti. X-koordinaattia kutsutaan pisteen A abskissaksi, y-koordinaatiksi pisteen A ordinaatiksi, z-koordinaatiksi pisteen A applikaatioksi. Se kirjoitetaan seuraavasti: A(a, b, c).
Orty
Suorakaiteen muotoista koordinaattijärjestelmää (mikä tahansa ulottuvuus) kuvaa myös joukko yksikkövektoreita, jotka on kohdistettu koordinaattiakseleiden kanssa. Yksikkövektoreiden lukumäärä on yhtä suuri kuin koordinaattijärjestelmän mitta ja ne ovat kaikki kohtisuorassa toisiinsa nähden.
Kolmiulotteisessa tapauksessa tällaisia yksikkövektoreita yleensä merkitään i j k tai e x e y e z. Tässä tapauksessa oikeakätisen koordinaatiston tapauksessa seuraavat kaavat vektorien vektoritulolla ovat voimassa:
- [i j]=k ;
- [j k]=i ;
- [k i]=j .
Tarina
Suorakulmaisen koordinaattijärjestelmän esitteli ensimmäisenä Rene Descartes teoksessaan "Discourse on Method" vuonna 1637. Siksi suorakaiteen muotoista koordinaattijärjestelmää kutsutaan myös - Suorakulmainen koordinaattijärjestelmä. Geometristen kohteiden kuvaamisen koordinaattimenetelmä merkitsi analyyttisen geometrian alkua. Pierre Fermat osallistui myös koordinaattimenetelmän kehittämiseen, mutta hänen teoksensa julkaistiin ensimmäisen kerran hänen kuolemansa jälkeen. Descartes ja Fermat käyttivät koordinaattimenetelmää vain tasossa.
Kolmiulotteisen avaruuden koordinaattimenetelmää käytti ensimmäisen kerran Leonhard Euler jo 1700-luvulla.
Katso myös
Linkit
Wikimedia Foundation. 2010.
Katso, mitä "Carteesinen koordinaattijärjestelmä" on muissa sanakirjoissa:
KORTESIANINEN KOORDINAATTIJÄRJESTELMÄ, suoraviivainen koordinaattijärjestelmä tasossa tai avaruudessa (yleensä keskenään kohtisuorat akselit ja yhtä suuret mittakaavat akseleita pitkin). Nimetty R. Descartesin mukaan (katso DESCARTES Rene). Descartes esitteli ensimmäisenä... tietosanakirja
KORTESIANINEN KOORDINAATTIJÄRJESTELMÄ- suorakaiteen muotoinen koordinaattijärjestelmä tasossa tai avaruudessa, jossa asteikot akseleilla ovat samat ja koordinaattiakselit ovat keskenään kohtisuorassa. D. s. K. on merkitty kirjaimilla x:, y pisteelle tasossa tai x, y, z avaruuden pisteelle. (Cm……
KARTESIAANINEN KOORDINAATTIJÄRJESTELMÄ, Rene DESCARTESin esittämä järjestelmä, jossa pisteen sijainti määräytyy etäisyyden siitä toisiaan leikkaaviin suoriin (akseleihin). Järjestelmän yksinkertaisimmassa versiossa akselit (merkitty x ja y) ovat kohtisuorassa... ... Tieteellinen ja tekninen tietosanakirja
Suorakulmainen koordinaattijärjestelmä
Suoraviivainen koordinaattijärjestelmä (katso Koordinaatit) tasossa tai avaruudessa (yleensä yhtä suuret mittakaavat akseleilla). R. Descartes itse "Geometriassa" (1637) käytti vain koordinaattijärjestelmää tasossa (yleensä vinossa). Usein… … Suuri Neuvostoliiton tietosanakirja
Määritelmäjoukko, joka toteuttaa koordinaattimenetelmän, eli tavan määrittää pisteen tai kappaleen sijainti numeroiden tai muiden symbolien avulla. Numerojoukkoa, joka määrittää tietyn pisteen sijainnin, kutsutaan tämän pisteen koordinaateiksi. Wikipediassa... ...
karteesinen järjestelmä- Dekarto koordinačių sistemos statusas T ala fizika atitikmenys: engl. karteesinen järjestelmä; Karteesinen koordinaattijärjestelmä vok. cartesisches Koordinatensystem, n; kartesisches Koordinatensystem, n rus. karteesinen järjestelmä, f; Karteesinen järjestelmä... ... Fizikos terminų žodynas
KOORDINAATTIJÄRJESTELMÄ- joukko ehtoja, jotka määrittävät pisteen sijainnin suoralla viivalla, tasossa, avaruudessa. Pallomuotoja on useita: suorakulmainen, vino, lieriömäinen, pallomainen, kaareva jne. Lineaariset ja kulmasuureet, jotka määrittävät sijainnin... ... Suuri ammattikorkeakoulun tietosanakirja
Ortonormaali suoraviivainen koordinaattijärjestelmä euklidisessa avaruudessa. D.p.s. tasossa määritellään kahdella keskenään kohtisuoralla suoralla koordinaattiakselilla, joista kummallekin valitaan positiivinen suunta ja yksikön segmentti ... Matemaattinen tietosanakirja
Suorakulmainen koordinaattijärjestelmä on suoraviivainen koordinaattijärjestelmä, jossa on keskenään kohtisuorat akselit tasossa tai avaruudessa. Yksinkertaisin ja siksi yleisimmin käytetty koordinaattijärjestelmä. Erittäin helposti ja suoraan yhteenveto... ... Wikipediaan
Kirjat
- Laskennallinen virtausdynamiikka. Teoreettinen perusta. Oppikirja, Valeri Alekseevich Pavlovsky, Dmitry Vladimirovich Nikushchenko. Kirja on omistettu systemaattiselle esittelylle teoreettiset perusteet tehtävien asettamiseen matemaattinen mallinnus nesteiden ja kaasujen virtaukset. Rakennusasioihin kiinnitetään erityistä huomiota...
Järjestetty järjestelmä kahdesta tai kolmesta toisiinsa nähden kohtisuorassa leikkaavasta akselista, joilla on yhteinen origo (koordinaattien alkupiste) ja yhteinen pituusyksikkö. suorakaiteen muotoinen suorakulmainen koordinaattijärjestelmä .
Yleinen suorakulmainen koordinaattijärjestelmä (affiininen koordinaattijärjestelmä) ei välttämättä sisällä kohtisuoraa akseleita. Ranskalaisen matemaatikon Rene Descartesin (1596-1662) kunniaksi nimetään juuri sellainen koordinaattijärjestelmä, jossa kaikilla akseleilla mitataan yhteinen pituusyksikkö ja akselit ovat suoria.
Suorakulmainen suorakulmainen koordinaattijärjestelmä tasossa on kaksi akselia ja suorakaiteen muotoinen suorakulmainen koordinaattijärjestelmä avaruudessa - kolme akselia. Jokainen piste tasossa tai avaruudessa määritellään järjestetyllä koordinaattijoukolla - numeroilla, jotka vastaavat koordinaattijärjestelmän pituusyksikköä.
Huomaa, että kuten määritelmästä seuraa, suoralla viivalla eli yhdessä ulottuvuudessa on suorakulmainen koordinaattijärjestelmä. Karteesisten koordinaattien käyttöönotto suoralla on yksi tavoista, joilla mikä tahansa suoran piste liitetään hyvin määriteltyyn reaalilukuun, toisin sanoen koordinaattiin.
Koordinaattimenetelmä, joka syntyi Rene Descartesin teoksissa, merkitsi kaiken matematiikan vallankumouksellista uudelleenjärjestelyä. Tuli tulkinta mahdolliseksi algebralliset yhtälöt(tai epäyhtälöt) geometristen kuvien (kaavioiden) muodossa ja päinvastoin etsiä ratkaisuja geometrisiin ongelmiin käyttämällä analyyttisiä kaavoja ja yhtälöjärjestelmiä. Kyllä, eriarvoisuutta z < 3 геометрически означает полупространство, лежащее ниже плоскости, параллельной координатной плоскости xOy ja sijaitsee tämän tason yläpuolella 3 yksikköä.
Karteesista koordinaattijärjestelmää käytettäessä pisteen jäsenyys tietyllä käyrällä vastaa sitä tosiasiaa, että luvut x Ja y täyttää jonkin yhtälön. Eli ympyrän pisteen koordinaatit, jonka keskipiste on annettu piste (a; b) täyttävät yhtälön (x - a)² + ( y - b)² = R² .
Suorakulmainen suorakulmainen koordinaattijärjestelmä tasossa
Kaksi kohtisuoraa akselia tasossa, joilla on yhteinen origo ja sama mittayksikkö Suorakulmainen suorakulmainen koordinaattijärjestelmä tasossa . Yhtä näistä akseleista kutsutaan akseliksi Härkä, tai x-akseli , toinen - akseli Oy, tai y-akseli . Näitä akseleita kutsutaan myös koordinaattiakseleiksi. Merkitään Mx Ja My vastaavasti mielivaltaisen pisteen projektio M akselilla Härkä Ja Oy. Kuinka saada ennusteita? Käydään kohta läpi M Härkä. Tämä suora leikkaa akselin Härkä pisteessä Mx. Käydään kohta läpi M suora viiva kohtisuorassa akseliin nähden Oy. Tämä suora leikkaa akselin Oy pisteessä My. Tämä näkyy alla olevassa kuvassa.
x Ja y pisteitä M kutsumme suunnattujen segmenttien arvoja vastaavasti OMx Ja OMy. Näiden suunnattujen segmenttien arvot lasketaan vastaavasti x = x0 - 0 Ja y = y0 - 0 . Suorakulmaiset koordinaatit x Ja y pisteitä M abskissa Ja ordinaattinen . Se, että kohta M on koordinaatit x Ja y, on merkitty seuraavasti: M(x, y) .
Koordinaattiakselit jakavat tason neljään osaan kvadrantti , jonka numerointi on esitetty alla olevassa kuvassa. Se näyttää myös merkkien järjestelyn pisteiden koordinaateille riippuen niiden sijainnista tietyssä kvadrantissa.
Tason suorakulmaisten suorakulmaisten koordinaattien lisäksi huomioidaan usein myös napakoordinaatisto. Tietoja siirtymämenetelmästä koordinaattijärjestelmästä toiseen - oppitunnilla napakoordinaattijärjestelmä .

Suorakulmainen suorakulmainen koordinaattijärjestelmä avaruudessa
Suorakulmaiset koordinaatit avaruudessa otetaan käyttöön täysin analogisesti tason suorakulmaisten koordinaattien kanssa.
Kolme keskenään kohtisuoraa akselia avaruudessa (koordinaattiakselit), joilla on yhteinen origo O ja samalla mittayksiköllä ne muodostavat Suorakulmainen suorakulmainen koordinaattijärjestelmä avaruudessa .
Yhtä näistä akseleista kutsutaan akseliksi Härkä, tai x-akseli , toinen - akseli Oy, tai y-akseli , kolmas - akseli Oz, tai akseli soveltuu . Antaa Mx, My Mz- mielivaltaisen pisteen projektiot M tilaa akselilla Härkä , Oy Ja Oz vastaavasti.
Käydään kohta läpi M HärkäHärkä pisteessä Mx. Käydään kohta läpi M taso, joka on kohtisuorassa akseliin nähden Oy. Tämä taso leikkaa akselin Oy pisteessä My. Käydään kohta läpi M taso, joka on kohtisuorassa akseliin nähden Oz. Tämä taso leikkaa akselin Oz pisteessä Mz.
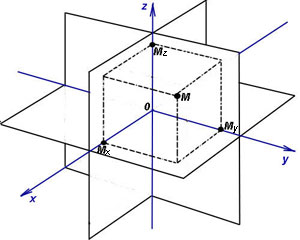
Suorakulmaiset suorakulmaiset koordinaatit x , y Ja z pisteitä M kutsumme suunnattujen segmenttien arvoja vastaavasti OMx, OMy Ja OMz. Näiden suunnattujen segmenttien arvot lasketaan vastaavasti x = x0 - 0 , y = y0 - 0 Ja z = z0 - 0 .
Suorakulmaiset koordinaatit x , y Ja z pisteitä M kutsutaan vastaavasti abskissa , ordinaattinen Ja soveltaa .
Pareittain otetut koordinaattiakselit sijaitsevat koordinaattitasoilla xOy , yOz Ja zOx .
Tehtäviä pisteistä suorakulmaisessa koordinaatistossa
Esimerkki 1.
A(2; -3) ;
B(3; -1) ;
C(-5; 1) .
Etsi näiden pisteiden projektioiden koordinaatit abskissa-akselille.
Ratkaisu. Kuten tämän oppitunnin teoreettisesta osasta seuraa, pisteen projektio abskissa-akselille sijaitsee itse abskissa-akselilla, eli akselilla Härkä, ja siksi sillä on abskissa, joka on yhtä suuri kuin itse pisteen abskissa, ja ordinaatta (koordinaatti akselilla Oy, jonka x-akseli leikkaa pisteessä 0), joka on yhtä suuri kuin nolla. Joten saamme seuraavat x-akselin pisteiden koordinaatit:
Ax(2;0);
Bx(3;0);
Cx (-5; 0).
Esimerkki 2. Karteesisessa koordinaatistossa pisteet annetaan tasossa
A(-3; 2) ;
B(-5; 1) ;
C(3; -2) .
Etsi näiden pisteiden projektioiden koordinaatit ordinaattiselle akselille.
Ratkaisu. Kuten tämän oppitunnin teoreettisesta osasta seuraa, pisteen projektio ordinaattiselle akselille sijaitsee itse ordinaatta-akselilla, eli akselilla Oy, ja siksi sillä on ordinaatti, joka on yhtä suuri kuin itse pisteen ordinaatta ja abskissa (koordinaatti akselilla Härkä, jonka ordinaatta-akseli leikkaa pisteessä 0), joka on yhtä suuri kuin nolla. Joten saamme seuraavat koordinaatit näistä pisteistä ordinaatta-akselilla:
Ay(0;2);
By(0;1);
Cy(0;-2).
Esimerkki 3. Karteesisessa koordinaatistossa pisteet annetaan tasossa
A(2; 3) ;
B(-3; 2) ;
C(-1; -1) .
Härkä .
Härkä Härkä Härkä, on sama abskissa kuin annetulla pisteellä, ja ordinaatilla on absoluuttinen arvo, joka on sama kuin annetun pisteen ordinaatta ja vastakkainen etumerkillä. Joten saamme seuraavat koordinaatit pisteisiin, jotka ovat symmetrisiä näihin pisteisiin suhteessa akseliin Härkä :
A"(2; -3) ;
B"(-3; -2) ;
C"(-1; 1) .
Ratkaise tehtäviä itse käyttämällä suorakulmaista koordinaattijärjestelmää ja katso sitten ratkaisuja
Esimerkki 4. Selvitä, missä neljänneksissä (neljännes, piirtäminen kvadranteilla - kappaleen "Suorakulmainen suorakulmainen koordinaattijärjestelmä tasossa" lopussa) piste voi sijaita M(x; y) , Jos
1) xy > 0 ;
2) xy < 0 ;
3) x − y = 0 ;
4) x + y = 0 ;
5) x + y > 0 ;
6) x + y < 0 ;
7) x − y > 0 ;
8) x − y < 0 .
Esimerkki 5. Karteesisessa koordinaatistossa pisteet annetaan tasossa
A(-2; 5) ;
B(3; -5) ;
C(a; b) .
Etsi näiden pisteiden kanssa symmetristen pisteiden koordinaatit suhteessa akseliin Oy .
Jatketaan ongelmien ratkaisemista yhdessä
Esimerkki 6. Karteesisessa koordinaatistossa pisteet annetaan tasossa
A(-1; 2) ;
B(3; -1) ;
C(-2; -2) .
Etsi näiden pisteiden kanssa symmetristen pisteiden koordinaatit suhteessa akseliin Oy .
Ratkaisu. Kierrä 180 astetta akselin ympäri Oy suunnattu segmentti akselilta Oy tähän saakka. Kuvassa, jossa tason neljännekset on merkitty, näemme, että piste on symmetrinen annettuun kohtaan suhteessa akseliin Oy, on sama ordinaatta kuin annetulla pisteellä, ja abskissa on absoluuttisesti yhtä suuri kuin annetun pisteen abskissa ja vastakkainen etumerkillä. Joten saamme seuraavat koordinaatit pisteisiin, jotka ovat symmetrisiä näihin pisteisiin suhteessa akseliin Oy :
A"(1; 2) ;
B"(-3; -1) ;
C"(2; -2) .
Esimerkki 7. Karteesisessa koordinaatistossa pisteet annetaan tasossa
A(3; 3) ;
B(2; -4) ;
C(-2; 1) .
Etsi näiden pisteiden kanssa symmetristen pisteiden koordinaatit suhteessa origoon.
Ratkaisu. Kierrämme suunnattua segmenttiä origosta annettuun pisteeseen 180 astetta origon ympäri. Kuvassa, jossa tason neljännekset on merkitty, näemme, että pisteen, joka on symmetrinen annettuun pisteeseen nähden koordinaattien origon suhteen, on abskissa ja ordinaatt itseisarvoltaan samat kuin annetun pisteen abskissa ja ordinaatit, mutta vastakkaisessa merkissä. Joten saamme seuraavat koordinaatit pisteisiin, jotka ovat symmetrisiä näihin pisteisiin suhteessa origoon:
A"(-3; -3) ;
B"(-2; 4) ;
C(2; -1) .
Esimerkki 8.
A(4; 3; 5) ;
B(-3; 2; 1) ;
C(2; -3; 0) .
Etsi näiden pisteiden projektioiden koordinaatit:
1) lentokoneessa Oxy ;
2) lentokoneessa Oxz ;
3) lentokoneeseen Oyz ;
4) abskissa-akselilla;
5) ordinaatta-akselilla;
6) sovellusakselilla.
1) Pisteen projektio tasolle Oxy sijaitsee tällä tasolla itse, ja sen vuoksi sen abskissa ja ordinaatta ovat yhtä suuret kuin tietyn pisteen abskissa ja ordinaatit, ja aplikaatti on nolla. Joten saamme seuraavat koordinaatit näiden pisteiden projektioille Oxy :
Axy (4; 3; 0);
Bxy (-3; 2; 0);
Cxy(2;-3;0).
2) Pisteen projektio tasolle Oxz sijaitsee itse tällä tasolla, ja siksi sen abskissa ja aplikaatti ovat yhtä suuret kuin tietyn pisteen abskissa ja aplikaatti, ja ordinaatta on yhtä suuri kuin nolla. Joten saamme seuraavat koordinaatit näiden pisteiden projektioille Oxz :
Axz (4; 0; 5);
Bxz (-3; 0; 1);
Cxz (2; 0; 0).
3) Pisteen projektio tasolle Oyz sijaitsee itse tällä tasolla, ja siksi sen ordinaatta ja aplikaatti on yhtä suuri kuin tietyn pisteen ordinaatta ja aplikaatti ja abskissa on nolla. Joten saamme seuraavat koordinaatit näiden pisteiden projektioille Oyz :
Ayz(0; 3; 5);
Byz (0; 2; 1);
Cyz (0; -3; 0).
4) Kuten tämän oppitunnin teoreettisesta osasta seuraa, pisteen projektio abskissa-akselille sijaitsee itse abskissa-akselilla, eli akselilla Härkä, ja sen vuoksi sen abskissa on yhtä suuri kuin itse pisteen abskissa, ja projektion ordinaatta ja applikaatti ovat nolla (koska ordinaatta- ja aplikaattiakselit leikkaavat abskissan pisteessä 0). Saamme seuraavat koordinaatit näiden pisteiden projektioista abskissa-akselille:
Ax(4;0;0);
Bx (-3; 0; 0);
Cx(2;0;0).
5) Pisteen projektio ordinaattiselle akselille sijaitsee itse ordinaatta-akselilla eli akselilla Oy, ja sen ordinaatta on siksi yhtä suuri kuin itse pisteen ordinaatta, ja projektion abskissa ja aplikaatti ovat nolla (koska abskissa- ja aplikaattiakselit leikkaavat ordinaatta-akselin pisteessä 0). Saamme seuraavat koordinaatit näiden pisteiden projektioille ordinaatta-akselille:
Ay(0; 3; 0);
By (0; 2; 0);
Cy(0;-3;0).
6) Pisteen projektio aplikaatioakselille sijaitsee itse aplikaatioakselilla eli akselilla Oz, ja siksi sen aplikaatti on yhtä suuri kuin itse pisteen aplikaatti, ja projektion abskissa ja ordinaatta ovat nolla (koska abskissa- ja ordinaatta-akselit leikkaavat aplikaattiakselin pisteessä 0). Saamme seuraavat koordinaatit näiden pisteiden projektioille sovellusakselille:
Az (0; 0; 5);
Bz (0; 0; 1);
Cz(0; 0; 0).
Esimerkki 9. Karteesisessa koordinaattijärjestelmässä pisteet annetaan avaruudessa
A(2; 3; 1) ;
B(5; -3; 2) ;
C(-3; 2; -1) .
Etsi näiden pisteiden kanssa symmetristen pisteiden koordinaatit suhteessa:
1) lentokone Oxy ;
2) lentokoneet Oxz ;
3) lentokoneet Oyz ;
4) abskissa-akselit;
5) ordinaattiset akselit;
6) soveltaa akselia;
7) koordinaattien alkuperä.
1) "Siirrä" pistettä akselin toisella puolella Oxy Oxy, sillä on abskissa ja ordinaatta, joka on yhtä suuri kuin tietyn pisteen abskissa ja ordinaatta, ja aplikaatti, joka on suuruudeltaan yhtä suuri kuin tietyn pisteen aplikaatti, mutta etumerkillisesti vastakkainen. Joten saamme seuraavat koordinaatit pisteisiin, jotka ovat symmetrisiä tiedoille suhteessa tasoon Oxy :
A"(2; 3; -1) ;
B"(5; -3; -2) ;
C"(-3; 2; 1) .
2) "Siirrä" pistettä akselin toisella puolella Oxz samalle etäisyydelle. Koordinaattiavaruutta esittävästä kuvasta näemme, että piste on symmetrinen annettuun kohtaan suhteessa akseliin Oxz, sillä on abskissa ja aplikaatti, joka on yhtä suuri kuin tietyn pisteen abskissa ja aplikaatti, ja ordinaatta, joka on suuruudeltaan yhtä suuri kuin tietyn pisteen ordinaatta, mutta vastakkainen etumerkillä. Joten saamme seuraavat koordinaatit pisteisiin, jotka ovat symmetrisiä tiedoille suhteessa tasoon Oxz :
A"(2; -3; 1) ;
B"(5; 3; 2) ;
C"(-3; -2; -1) .
3) "Siirrä" pistettä akselin toisella puolella Oyz samalle etäisyydelle. Koordinaattiavaruutta esittävästä kuvasta näemme, että piste on symmetrinen annettuun kohtaan suhteessa akseliin Oyz, on ordinaatti ja aplikaatti, jotka ovat yhtä suuret kuin tietyn pisteen ordinaatit ja aplikaatti, ja abskissa, joka on yhtä suuri kuin tietyn pisteen abskissa, mutta vastakkainen etumerkillä. Joten saamme seuraavat koordinaatit pisteisiin, jotka ovat symmetrisiä tiedoille suhteessa tasoon Oyz :
A"(-2; 3; 1) ;
B"(-5; -3; 2) ;
C"(3; 2; -1) .
Analogisesti tasossa olevien symmetristen pisteiden ja avaruuden pisteiden kanssa, jotka ovat symmetrisiä datan suhteen tasoihin nähden, huomaamme, että jos kyseessä on symmetria avaruuden suorakulmaisen koordinaattijärjestelmän jonkin akselin suhteen, akselin koordinaatti suhteessa jonka symmetria on annettu, säilyttää etumerkkinsä ja kahdella muulla akselilla olevat koordinaatit ovat absoluuttisesti samat kuin tietyn pisteen koordinaatit, mutta etumerkillisesti vastakkaiset.
4) Abskissa säilyttää merkkinsä, mutta ordinaatta ja aplikaatti vaihtavat merkkejä. Joten saamme seuraavat datalle symmetriset pisteiden koordinaatit suhteessa abskissa-akseliin:
A"(2; -3; -1) ;
B"(5; 3; -2) ;
C"(-3; -2; 1) .
5) Ordinaatta säilyttää merkkinsä, mutta abskissa ja aplikaatti vaihtavat merkkejä. Joten saamme seuraavat koordinaatit pisteisiin, jotka ovat symmetrisiä tietoihin nähden suhteessa ordinaatta-akseliin:
A"(-2; 3; -1) ;
B"(-5; -3; -2) ;
C"(3; 2; 1) .
6) Hakemus säilyttää merkkinsä, mutta abskissa ja ordinaatta vaihtavat merkkejä. Joten saamme seuraavat koordinaatit pisteisiin, jotka ovat symmetrisiä datan kanssa suhteessa sovellusakseliin:
A"(-2; -3; 1) ;
B"(-5; 3; 2) ;
C"(3; -2; -1) .
7) Analogisesti symmetrian kanssa tason pisteiden tapauksessa, jos symmetria on koordinaattien origon suhteen, kaikki pisteen koordinaatit, jotka ovat symmetrisiä tietylle pisteelle, ovat absoluuttisesti yhtä suuria kuin tietyn pisteen koordinaatit, mutta vastapäätä niitä merkissä. Joten saamme seuraavat koordinaatit pisteisiin, jotka ovat symmetrisiä datan kanssa suhteessa origoon.
), jonka avulla määritetään valaisimien ja apupisteiden sijainti taivaanpallolla. Tähtitiedessä käytetään erilaisia taivaankoordinaattijärjestelmiä. Jokainen niistä on olennaisesti pallomainen koordinaattijärjestelmä (ilman säteittäistä koordinaattia), jolla on asianmukaisesti valittu perustaso ja origo. Perustason valinnasta riippuen taivaankoordinaatistoa kutsutaan vaakasuuntaiseksi (horisonttitaso), ekvatoriaaliseksi (ekvatoriaalinen taso), ekliptikaksi (ekliptinen taso) tai galaksiksi (galaktinen taso).
Koordinaatteja tasossa ja avaruudessa voidaan syöttää äärettömästi eri tavoilla. Ratkaistaessa tiettyä matemaattista tai fyysistä ongelmaa koordinaattimenetelmällä, voit käyttää erilaisia koordinaattijärjestelmiä valitsemalla se, jossa ongelma ratkaistaan tässä tapauksessa helpommin tai kätevämmin. Tunnettu koordinaattijärjestelmien yleistys ovat referenssijärjestelmät ja referenssijärjestelmät.
Tietosanakirja YouTube
1 / 5
Karteesisen koordinaattijärjestelmän malli.
Geometria 11. luokka - Suorakulmainen koordinaattijärjestelmä avaruudessa
Koordinaattitaso ➽ Algebra 7. luokka ➽ Videotunti
Video-opetusohjelma "Napakoordinaattijärjestelmä"
Suorakaiteen muotoinen koordinaattijärjestelmä avaruudessa. Vektorikoordinaatit. Videotunti geometriasta 11. luokka
Tekstitykset
Perusjärjestelmät
Tässä osiossa selitetään perusmatematiikan yleisimmin käytetyt koordinaattijärjestelmät.
Suorakulmaiset koordinaatit
Pisteen sijainti P lentokoneessa on päätetty Suorakulmaiset koordinaatit käyttämällä paria numeroa (x, y) : (\näyttötyyli (x,y):)
Avaruudessa tarvitset jo 3 koordinaattia (x, y, z) : (\näyttötyyli (x,y,z):)
Polaarikoordinaatit
SISÄÄN napakoordinaattijärjestelmä, sovellettu tasoon, pisteen sijainti P määräytyy sen etäisyyden perusteella alkuperään r= |OP| ja sen sädevektorin kulma φ akseliin nähden Härkä .
Avaruudessa käytetään polaaristen koordinaattien yleistyksiä - lieriömäinen Ja pallomainen koordinaattijärjestelmät.
Sylinterimäiset koordinaatit
Sylinterimäiset koordinaatit- napaisten kolmiulotteinen analogi, jossa piste P näyttää olevan tilattu kolmio (r, φ, z). (\displaystyle (r,\varphi ,z).)
Huomautus: kirjallisuudessa käytetään joskus merkintää ρ ensimmäiselle (säteittäiselle) koordinaatille, merkintää θ toiselle (kulma- tai atsimuutti-) koordinaatille ja merkintää θ kolmannelle koordinaatille. h .Napakoordinaateilla on yksi haittapuoli: φ:n arvoa ei ole määritelty milloin r = 0 .
Sylinterimäiset koordinaatit ovat hyödyllisiä tutkittaessa järjestelmiä, jotka ovat symmetrisiä jonkin akselin suhteen. Esimerkiksi pitkä sylinteri, jolla on säde R suorakulmaisissa koordinaateissa (akselilla z, joka on sama kuin sylinterin akseli), on yhtälö x 2 + y 2 = R 2 , (\näyttötyyli x^(2)+y^(2)=R^(2),) kun taas sylinterimäisissä koordinaateissa se näyttää paljon yksinkertaisemmalta, esim r = R .
Pallomaiset koordinaatit
Pallomaiset koordinaatit- napaisten kolmiulotteinen analogi.
Pallomaisessa koordinaattijärjestelmässä pisteen sijainti on P määräytyy kolmella osatekijällä: (ρ, φ, θ) . (\displaystyle (\rho ,\varphi ,\theta).) Mitä tulee suorakulmaiseen koordinaattijärjestelmään,
Huomautus: Kirjallisuudessa atsimuuttia merkitään joskus θ:lla ja napakulmaa φ:llä. Joskus käytetään säteittäisenä koordinaatina rρ:n sijasta. Lisäksi atsimuutin kulmien alueeksi voidaan valita (−180°, +180°] alueen sijasta etäisyyden sijasta. Joskus kolmiosan koordinaattien järjestys valitaan eri tavalla kuin on kuvattu; esimerkiksi napa- ja atsimuuttikulmat voidaan vaihtaa.Pallomaisessa koordinaattijärjestelmässä on myös haittapuoli: φ ja θ eivät ole määriteltyjä, jos ρ = 0; Kulmaa φ ei myöskään ole määritelty raja-arvoille θ = 0 ja θ = 180° (tai arvolle θ = ±90°, jos tälle kulman sopiva alue on otettu käyttöön).
Piirrä piste P pallomaisten koordinaattiensa mukaan se on tarpeen navasta positiivista puoliakselia pitkin z aseta sivuun segmentti, joka on yhtä suuri kuin ρ, kierrä sitä kulman θ verran akselin ympäri y x, ja kierrä sitten kulman θ verran akselin ympäri z positiivisen puoliakselin suunnassa y .
Pallomaiset koordinaatit ovat hyödyllisiä tutkittaessa järjestelmiä, jotka ovat symmetrisiä pisteen suhteen. Siten yhtälö pallosta, jolla on säde R karteesisissa koordinaateissa, joiden origo on pallon keskellä, näyttää tältä x 2 + y 2 + z 2 = R 2 , (\näyttötyyli x^(2)+y^(2)+z^(2)=R^(2),) kun taas pallokoordinaateissa siitä tulee paljon yksinkertaisempaa: ρ = R. (\displaystyle \rho =R.)
Muut yleiset koordinaattijärjestelmät
- Affine (viisto) koordinaattijärjestelmä- suoraviivainen koordinaattijärjestelmä affiinissa avaruudessa. Tasossa se määritellään koordinaattien alkupisteellä NOIN ja kaksi järjestettyä ei-kollineaarista vektoria, jotka edustavat affiinia kantaa. Tässä tapauksessa koordinaattiakselit ovat suoria viivoja, jotka kulkevat alkupisteen kautta samansuuntaisesti kantavektoreiden kanssa, jotka puolestaan määrittävät akselien positiivisen suunnan. Vastaavasti kolmiulotteisessa avaruudessa affiininen koordinaattijärjestelmä määritellään lineaarisesti riippumattomien vektorien kolminkertaisella ja alkupisteellä. Tietyn pisteen koordinaattien määrittäminen M vektorin laajennuskertoimet lasketaan OM kantavektoreiden mukaan.
- Barysentriset koordinaatit esitteli ensimmäisen kerran vuonna 1827 A. Moebius, joka ratkaisi kolmion huipuissa sijaitsevien massojen painopisteen ongelman. Ne ovat affinisia invariantteja ja edustavat erikoistapaus yleiset homogeeniset koordinaatit. Piste barysentrisillä koordinaatteilla sijaitsee osoitteessa n-ulotteinen vektoriavaruus E n, ja itse koordinaatit viittaavat kiinteään pistejärjestelmään, joka ei sijaitse ( n−1)-ulotteinen aliavaruus. Barysentrisiä koordinaatteja käytetään myös algebrallisessa topologiassa suhteessa simpleksipisteisiin.
- Kaksikulmaiset koordinaatit- kaksikeskisten koordinaattien erikoistapaus, koordinaattijärjestelmä kahden kiinteän pisteen määrittelemällä tasolla KANSSA 1 ja KANSSA 2, jonka läpi vedetään suora viiva, joka toimii abskissa-akselina. Jonkin pisteen asento P, joka ei ole tällä viivalla, määräytyy kulmien mukaan PC 1 C 2 ja PC 2 C 1 .
- Bipolaariset koordinaatit niille on tunnusomaista se, että tässä tapauksessa kaksi napojen ympyräperhettä toimivat koordinaattilinjoina tasossa A Ja B, sekä niihin nähden kohtisuorassa olevien ympyröiden perhe. Kaksinapaisten koordinaattien muuntaminen suorakulmaisiksi koordinaatteiksi suoritetaan erityisillä kaavoilla. Bipolaarisia koordinaatteja avaruudessa kutsutaan bisfäärisiksi; tässä tapauksessa koordinaattipinnat ovat palloja, ympyränkaarien pyörimisen muodostamia pintoja sekä akselin läpi kulkevia puolitasoja O z .
- Kaksikeskiset koordinaatit- mikä tahansa koordinaattijärjestelmä, joka perustuu kahteen kiinteitä pisteitä ja jossa jonkin muun pisteen sijainti määräytyy pääsääntöisesti sen poistumisasteella tai yleensä sen sijainnilla näihin kahteen pääpisteeseen nähden. Tällaiset järjestelmät voivat olla varsin hyödyllisiä tietyillä alueilla tieteellinen tutkimus.
- Kaksisylinteriset koordinaatit- koordinaattijärjestelmä, joka muodostuu, jos tasossa on kaksinapainen koordinaattijärjestelmä Oxy yhdensuuntainen akselin kanssa O z. Tässä tapauksessa koordinaattipinnat ovat ryhmä pyöreitä sylinteripareja, joiden akselit ovat yhdensuuntaiset, ryhmä pyöreitä sylintereitä, jotka ovat kohtisuorassa niihin, sekä taso. Kaksisylinteristen koordinaattien muuntamiseen suorakulmaisiksi kolmiulotteisiksi koordinaatteiksi käytetään myös erityisiä kaavoja.
- Kartiokoordinaatit- kolmiulotteinen ortogonaalinen koordinaattijärjestelmä, joka koostuu samankeskisistä palloista, jotka kuvataan niiden säteellä, ja kahdesta kohtisuorassa olevasta kartioryhmästä, jotka sijaitsevat akseleita pitkin x Ja z .
- Rindlerin koordinaatit käytetään ensisijaisesti suhteellisuusteorian puitteissa ja kuvaavat tasaisen aika-avaruuden osaa, jota yleensä kutsutaan Minkowski-avaruudeksi. Erityisessä suhteellisuusteoriassa tasaisesti kiihtyvä hiukkanen on hyperbolisessa liikkeessä ja jokaiselle tällaiselle hiukkaselle voidaan Rindler-koordinaateissa valita vertailupiste, johon nähden se on levossa.
- Paraboliset koordinaatit on kaksiulotteinen ortogonaalinen koordinaattijärjestelmä, jossa koordinaattiviivat ovat joukko konfokaalisia paraabeleja. Kolmiulotteinen parabolisten koordinaattien muunnos muodostetaan kiertämällä kaksiulotteinen järjestelmä näiden paraabelien symmetria-akselin ympäri. Parabolisilla koordinaatteilla on myös tietty valikoima potentiaalisia käytännön sovelluksia: niitä voidaan käyttää erityisesti Stark-ilmiön suhteen. Paraboliset koordinaatit liittyvät tietyllä tavalla suorakulmaisiin suorakulmaisiin koordinaatteihin.
- Projektiiviset koordinaatit olemassa nimen mukaan projektitiivisessa avaruudessa P n (TO) ja edustavat yksi-yhteen vastaavuutta sen elementtien ja kappaleen elementtien äärellisten osajoukkojen luokkien välillä TO, jolle on tunnusomaista vastaavuuden ja järjestyksen ominaisuudet. Projektiivisten aliavaruuksien projektiivisten koordinaattien määrittämiseksi riittää, että määritetään vastaavat projektitiivisen avaruuden pisteiden koordinaatit. Yleisessä tapauksessa, suhteessa johonkin perustaan, projektiiviset koordinaatit otetaan käyttöön puhtaasti projektiivisin keinoin.
- Toroidaalinen koordinaattijärjestelmä- kolmiulotteinen ortogonaalinen koordinaattijärjestelmä, joka saadaan kiertämällä kaksiulotteista bipolaarista koordinaattijärjestelmää sen kaksi polttopistettä erottavan akselin ympäri. Kaksinapaisen järjestelmän fokukset muuttuvat vastaavasti renkaaksi, jolla on säde A, makaa lentokoneessa xy toroidaalinen koordinaattijärjestelmä, kun taas akseli z tulee järjestelmän pyörimisakseliksi. Polttorengasta kutsutaan joskus myös perusympyräksi.
- Trilineaariset koordinaatit ovat yksi esimerkeistä homogeenisista koordinaateista ja perustuvat annettuun kolmioon, joten tietyn pisteen sijainti määräytyy suhteessa tämän kolmion sivuihin - pääasiassa etäisyysasteella niistä, vaikka muutkin vaihtelut ovat mahdollisia. Trilineaariset koordinaatit voidaan muuntaa barysentrisiksi koordinaateiksi suhteellisen helposti; Lisäksi ne ovat myös muunnettavissa kaksiulotteisiksi suorakaiteen muotoisiksi koordinaatteiksi, joihin käytetään vastaavia kaavoja.
- Sylinterimäiset paraboliset koordinaatit- kolmiulotteinen ortogonaalinen koordinaattijärjestelmä, joka on saatu kaksiulotteisen parabolisen koordinaattijärjestelmän tilamuunnoksen tuloksena. Koordinaattipinnat ovat vastaavasti konfokaalisia parabolisia sylintereitä. Sylinterimäisillä parabolisilla koordinaatteilla on tietty suhde suorakulmaisten koordinaattien kanssa, ja niitä voidaan käyttää useilla tieteellisen tutkimuksen aloilla.
- Ellipsoidiset koordinaatit- elliptiset koordinaatit avaruudessa. Koordinaattipinnat ovat tässä tapauksessa ellipsoidit, yksiarkkiset hyperboloidit sekä kaksiarkkiset hyperboloidit, joiden keskipisteet sijaitsevat origossa. Järjestelmä on ortogonaalinen. Jokainen lukukolmio, jotka ovat ellipsoidisia koordinaatteja, vastaa kahdeksaa pistettä, jotka ovat suhteessa järjestelmän tasoihin Oxyz symmetrisiä keskenään.
Siirtyminen koordinaattijärjestelmästä toiseen
karteesinen ja polaarinen
Missä u 0 - Heaviside-toiminto u 0 (0) = 0, (\displaystyle u_(0)(0)=0,) ja sgn on merkkifunktio. Tässä ovat toiminnot u 0 ja sgn ovat "loogisia" kytkimiä, jotka ovat merkitykseltään samanlaisia kuin ohjelmointikielten "if...else"-lauseet. Joillakin ohjelmointikielillä on erityinen atan2-toiminto ( y , x), joka palauttaa oikean φ:n vaaditussa kvadrantissa, jonka koordinaatit määrittävät x Ja y .




