데카르트 좌표계: 기본 개념 및 예.
물론 좌표 방법은 매우 훌륭하지만 실제 C2 문제에는 좌표나 벡터가 없습니다. 그러므로 그들은 소개되어야 할 것이다. 예, 예, 이렇게 입력하십시오. 원점, 단위 세그먼트 및 x, y 및 z 축의 방향을 나타냅니다.
이 방법의 가장 큰 특징은 좌표계를 얼마나 정확하게 입력하느냐는 중요하지 않다는 점이다. 모든 계산이 정확하다면 답도 정확할 것입니다.
큐브 좌표
문제 C2에 큐브가 포함되어 있으면 운이 좋다고 생각하세요. 이것은 가장 단순한 다면체로, 모든 2면체 각도는 90°입니다.
좌표계 입력도 매우 간단합니다.
- 좌표의 원점은 A 지점에 있습니다.
- 대부분의 경우 큐브의 가장자리는 표시되지 않으므로 이를 단위 세그먼트로 간주합니다.
- x축은 모서리 AB를 따라 향하고, y는 모서리 AD를 따라, z축은 모서리 AA 1을 따라 향합니다.
참고: Z축은 위쪽을 향하고 있습니다! 2차원 이후 좌표계이것은 다소 특이하지만 실제로는 매우 논리적입니다.
이제 큐브의 각 꼭지점에는 좌표가 있습니다. 큐브의 바닥면에 대해 별도로 테이블에 수집해 보겠습니다.
위쪽 평면의 점은 z 좌표에서만 아래쪽 평면의 해당 점과 다르다는 것을 쉽게 알 수 있습니다. 예를 들어 B = (1; 0; 0), B 1 = (1; 0; 1)입니다. 가장 중요한 것은 혼동하지 않는 것입니다!
프리즘은 이미 훨씬 더 재미있습니다. 올바른 접근 방식을 사용하면 아래쪽 베이스의 좌표만 아는 것으로 충분합니다. 위쪽 베이스는 자동으로 계산됩니다.
문제 C2는 정삼면체 프리즘(밑면에 정삼각형이 있는 직선 프리즘)에만 관련된 것입니다. 이들의 경우 좌표계는 큐브와 거의 동일한 방식으로 도입됩니다. 그런데 모르는 사람이 있다면 정육면체도 프리즘이고 사면체일 뿐입니다.
자, 가자! 좌표계를 소개합니다.
- 좌표의 원점은 A 지점에 있습니다.
- 문제 설명에 달리 명시되지 않는 한 프리즘의 측면을 단일 세그먼트로 간주합니다.
- x축은 모서리 AB를 따라, z는 모서리 AA 1을 따라 지정하고, OXY 평면이 기본 평면 ABC와 일치하도록 y축의 위치를 지정합니다.
여기에는 몇 가지 설명이 필요합니다. 사실 많은 사람들이 믿는 것처럼 y축은 가장자리 AC와 일치하지 않습니다. 왜 일치하지 않습니까? 스스로 생각해 보세요. 삼각형 ABC는 정변이고 모든 각도는 60°입니다. 그리고 좌표축 사이의 각도는 90°여야 하므로 위 그림은 다음과 같습니다.

이제 y축이 AC를 따라 가지 않는 이유가 명확해지기를 바랍니다. 이 삼각형에 높이 CH를 그려 보겠습니다. 삼각형 ACH는 직각삼각형이고 AC = 1이므로 AH = 1 · cos A = cos 60°입니다. CH = 1 sin A = sin 60°. C점의 좌표를 계산하려면 이러한 사실이 필요합니다.
이제 구성된 좌표계와 함께 전체 프리즘을 살펴보겠습니다.

우리는 다음과 같은 점의 좌표를 얻습니다.

보시다시피, 프리즘의 위쪽 밑면의 점은 z 좌표에 의해서만 아래쪽의 해당 점과 다시 다릅니다. 주요 문제는 C점과 C1점입니다. 그들은 당신이 기억해야 할 비합리적인 좌표를 가지고 있습니다. 글쎄, 아니면 그들이 어디서 왔는지 이해하십시오.
육각 프리즘 좌표
육각형 프리즘은 "복제된" 삼각형 프리즘입니다. 하단 베이스를 보면 이런 일이 어떻게 발생하는지 이해할 수 있습니다. 이를 ABCDEF라고 부르겠습니다. AD, BE, CF 세그먼트를 추가로 구성해 보겠습니다. 결과는 6개의 삼각형이며 각 삼각형(예: 삼각형 ABO)은 삼면체 프리즘의 기초입니다.

이제 좌표계 자체를 소개하겠습니다. 좌표의 원점인 O점은 육각형 ABCDEF의 대칭 중심에 배치됩니다. x축은 FC를 따라 이동하고 y축은 세그먼트 AB와 DE의 중간점을 통과합니다. 우리는 다음과 같은 그림을 얻습니다.

참고: 원점은 다면체의 꼭지점과 일치하지 않습니다! 실제로 실제 문제를 풀 때 계산량을 대폭 줄일 수 있어 매우 편리하다는 것을 알 수 있습니다.
남은 것은 z축을 추가하는 것뿐입니다. 전통에 따르면 OXY 평면에 수직으로 그리고 수직으로 위쪽을 향하게 합니다. 우리는 최종 그림을 얻습니다.

이제 점의 좌표를 적어 보겠습니다. 정육각형 프리즘의 모든 모서리가 1이라고 가정합니다. 따라서 아래쪽 밑면의 좌표는 다음과 같습니다.
상단 베이스의 좌표는 z축을 따라 1만큼 이동됩니다.
피라미드는 일반적으로 매우 가혹합니다. 우리는 가장 간단한 경우, 즉 모든 모서리가 1인 일반 사각형 피라미드만을 분석할 것입니다. 그러나 실제 C2 문제에서는 모서리의 길이가 다를 수 있으므로 좌표를 계산하는 일반적인 방식은 다음과 같습니다.
그래서 일반적인 사각형 피라미드입니다. 이것은 Cheops와 동일하지만 조금 더 작습니다. SABCD로 표시하겠습니다. 여기서 S는 꼭지점입니다. 좌표계를 소개하겠습니다. 원점은 A점이고, 단위 세그먼트 AB = 1이며, x축은 AB를 따라 향하고, y축은 AD를 향하고, z축은 OXY 평면에 수직인 위쪽을 향합니다. . 추가 계산을 위해서는 높이 SH가 필요하므로 높이를 높이겠습니다. 우리는 다음 그림을 얻습니다.

이제 점의 좌표를 찾아보겠습니다. 먼저 OXY 평면을 살펴보겠습니다. 여기에서는 모든 것이 간단합니다. 밑면은 정사각형이고 좌표가 알려져 있습니다. 점 S에서 문제가 발생합니다. SH는 OXY 평면까지의 높이이므로 점 S와 H는 z 좌표에서만 다릅니다. 실제로 세그먼트 SH의 길이는 H = (0.5; 0.5; 0)이므로 점 S의 z 좌표입니다.
그것을주의해라 삼각형 ABC ASC는 세 변이 동일합니다(AS = CS = AB = CB = 1, 변 AC가 공통). 따라서 SH = BH입니다. 그러나 BH는 정사각형 ABCD의 대각선의 절반입니다. BH = AB 죄 45°. 우리는 모든 점의 좌표를 얻습니다.
그게 전부 피라미드의 좌표입니다. 그러나 좌표는 전혀 아닙니다. 우리는 가장 일반적인 다면체만을 살펴보았지만 이러한 예는 다른 그림의 좌표를 독립적으로 계산하는 데 충분합니다. 따라서 실제로 특정 문제 C2를 해결하는 방법으로 진행할 수 있습니다.
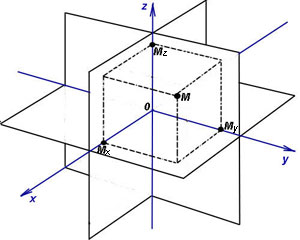
공간에서 한 점의 위치를 결정하기 위해 직교 직교 좌표를 사용합니다(그림 2).
공간의 직각좌표계는 서로 수직인 세 개의 좌표축 OX, OY, OZ로 구성됩니다. 좌표축은 원점이라고 하는 점 O에서 교차하며, 각 축에서 화살표로 표시된 양의 방향이 선택되고 축의 세그먼트에 대한 측정 단위가 선택됩니다. 측정 단위는 일반적으로 모든 축에서 동일합니다(반드시 그런 것은 아님). OX 축은 가로축(또는 간단히 가로축)이라고 하며, OY 축은 세로축, OZ 축은 해당 축입니다.
공간에서 점 A의 위치는 x, y, z 세 좌표에 의해 결정됩니다. x 좌표는 세그먼트 OB의 길이와 같고, y 좌표는 세그먼트 OC의 길이이며, z 좌표는 선택한 측정 단위에서 세그먼트 OD의 길이입니다. 세그먼트 OB, OC 및 OD는 각각 YOZ, XOZ 및 XOY 평면에 평행한 점에서 그려진 평면으로 정의됩니다.
x 좌표를 A 지점의 가로좌표라고 하고, y 좌표를 A 지점의 세로 좌표라고 하며, z 좌표를 A 지점의 Applicate라고 합니다.
상징적으로는 다음과 같이 쓰여 있습니다.
또는 색인을 사용하여 좌표 레코드를 특정 지점에 연결합니다.
x A , y A , z A ,

각 축은 수직선으로 간주됩니다. 즉, 양의 방향을 가지며 음의 광선에 있는 점이 할당됩니다. 음수 값좌표(거리는 빼기 기호로 표시됨) 즉, 예를 들어 점 B가 그림과 같이 광선 OX에 있지 않고 연속되는 경우 반대쪽점 O(OX 축의 음수 부분)에서 점 A의 x 가로좌표는 음수(거리 OB를 뺀 값)가 됩니다. 다른 두 축도 마찬가지입니다.
그림에 표시된 좌표축 OX, OY, OZ. 2, 오른손 좌표계를 형성합니다. 즉, OX 축의 양의 방향을 따라 YOZ 평면을 보면 OZ 축을 향한 OY 축의 이동이 시계 방향이 됩니다. 이 상황은 김릿 규칙을 사용하여 설명할 수 있습니다. 김릿(오른쪽 나사산이 있는 나사)이 OY 축에서 OZ 축 방향으로 회전하면 OX 축의 양의 방향을 따라 이동합니다.
좌표축을 따라 향하는 단위 길이의 벡터를 좌표 단위 벡터라고 합니다. 그들은 일반적으로 다음과 같이 지정됩니다.  (그림 3). 명칭도 있어요
(그림 3). 명칭도 있어요  단위 벡터는 좌표계의 기초를 형성합니다.
단위 벡터는 좌표계의 기초를 형성합니다.
오른손 좌표계의 경우 단위 벡터의 벡터 곱을 사용하는 다음 공식이 유효합니다.

평면 위의 직교 좌표계는 서로 수직인 두 좌표축 X'X와 Y'Y로 구성됩니다. 좌표축은 원점이라고 불리는 점 O에서 교차하며 X'X 축이 회전할 때 축의 양의 방향(오른쪽 좌표계에서)이 선택됩니다. 시계 반대 방향으로 90°만큼 양의 방향은 Y'Y 축의 양의 방향과 일치합니다. 좌표축 X'X와 Y'Y가 이루는 네 개의 각도(I, II, III, IV)를 좌표각이라고 합니다(그림 1 참조).
평면에서 점 A의 위치는 두 좌표 x와 y에 의해 결정됩니다. x 좌표는 세그먼트 OB의 길이와 같고, y 좌표는 선택한 측정 단위에서 세그먼트 OC의 길이와 같습니다. 세그먼트 OB 및 OC는 각각 Y'Y 및 X'X 축에 평행한 점 A에서 그려진 선으로 정의됩니다. x 좌표를 A 지점의 가로 좌표라고 하고, y 좌표를 A 지점의 세로 좌표라고 합니다. 다음과 같이 씁니다: A(x, y).
점 A가 좌표각 I에 있으면 점 A는 양의 가로좌표와 세로좌표를 갖습니다. 점 A가 좌표 각도 II에 있으면 점 A는 음의 가로 좌표와 양의 세로 좌표를 갖습니다. 점 A가 좌표각 III에 있으면 점 A는 음의 가로좌표와 세로좌표를 갖습니다. 점 A가 좌표각 IV에 있으면 점 A는 양의 가로좌표와 음의 세로좌표를 갖습니다.
공간의 직사각형 좌표계는 서로 수직인 세 개의 좌표축 OX, OY, OZ로 구성됩니다. 좌표축은 원점이라고 하는 점 O에서 교차하며, 각 축에서 화살표로 표시된 양의 방향이 선택되고 축의 세그먼트에 대한 측정 단위가 선택됩니다. 측정 단위는 모든 축에서 동일합니다. OX - 가로축, OY - 세로축, OZ - 해당 축. 축의 양의 방향은 OX 축이 시계 반대 방향으로 90° 회전할 때 이 회전이 OZ 축의 양의 방향에서 관찰되는 경우 양의 방향이 OY 축의 양의 방향과 일치하도록 선택됩니다. 이러한 좌표계를 오른손잡이라고 합니다. 만약에 무지 오른손 X 방향을 X 방향으로, 인덱스 1을 Y 방향으로, 중간을 Z 방향으로 취하면 오른쪽 좌표계가 형성됩니다. 왼손의 비슷한 손가락이 왼쪽 좌표계를 형성합니다. 해당 축이 일치하도록 오른쪽과 왼쪽 좌표계를 결합하는 것은 불가능합니다(그림 2 참조).

공간에서 점 A의 위치는 x, y, z 세 좌표에 의해 결정됩니다. x 좌표는 세그먼트 OB의 길이와 같고, y 좌표는 세그먼트 OC의 길이이며, z 좌표는 선택한 측정 단위에서 세그먼트 OD의 길이입니다. 세그먼트 OB, OC 및 OD는 각각 YOZ, XOZ 및 XOY 평면에 평행한 점 A에서 그려진 평면으로 정의됩니다. x 좌표는 A점의 가로좌표, y좌표는 A점의 세로좌표, z좌표는 A점의 적용점이라고 합니다. A(a, b, c)와 같이 작성됩니다.
오르티
(모든 차원의) 직사각형 좌표계는 좌표축과 정렬된 단위 벡터 세트로 설명됩니다. 단위 벡터의 수는 좌표계의 차원과 동일하며 모두 서로 수직입니다.
3차원의 경우 이러한 단위 벡터는 일반적으로 다음과 같이 표시됩니다. 나 제이 케이또는 이자형엑스 이자형와이 이자형지. 이 경우 오른쪽 좌표계의 경우 벡터의 벡터 곱을 사용하는 다음 공식이 유효합니다.
- [나 제이]=케이 ;
- [제이 케이]=나 ;
- [케이 나]=제이 .
이야기
직교좌표계는 1637년 르네 데카르트의 저서 『방법론』에서 처음 소개됐다. 따라서 직교 좌표계는 - 직교 좌표계. 기하학적 객체를 기술하는 좌표법은 분석기하학의 시작을 알렸습니다. 피에르 페르마(Pierre Fermat)도 좌표법 개발에 기여했지만 그의 작품은 사후에 처음 출판되었습니다. 데카르트와 페르마는 평면에서만 좌표법을 사용했습니다.
3차원 공간의 좌표법은 이미 18세기에 레온하르트 오일러(Leonhard Euler)에 의해 처음 사용되었습니다.
또한보십시오
연결
위키미디어 재단. 2010.
다른 사전에 "직교 좌표계"가 무엇인지 확인하십시오.
직교좌표계(CARTESIAN COORDINATE SYSTEM), 평면이나 공간의 직선 좌표계(보통 서로 수직인 축과 축을 따라 동일한 스케일을 가짐). R. Descartes의 이름을 따서 명명되었습니다(DESCARTES Rene 참조). 데카르트가 처음으로 소개한 ... 백과사전
직교좌표계- 축을 따른 스케일이 동일하고 좌표축이 서로 수직인 평면 또는 공간의 직사각형 좌표계. D.s. K.는 평면 위의 점을 나타내는 문자 x:, y로 표시하거나 공간의 점을 나타내는 문자 x, y, z로 표시합니다. (센티미터.… …
CARTESIAN COORDINATE SYSTEM은 Rene DESCARTES가 도입한 시스템으로, 점의 위치는 점에서 서로 교차하는 선(축)까지의 거리에 따라 결정됩니다. 가장 간단한 버전의 시스템에서는 축(x와 y로 표시)이 수직입니다.... ... 과학 기술 백과사전
직교 좌표계
평면이나 공간(일반적으로 축을 따라 동일한 축척을 사용)의 직선 좌표계(좌표 참조)입니다. R. 데카르트 자신은 "기하학"(1637)에서 평면(일반적으로 경사)의 좌표계만 사용했습니다. 자주… … 위대한 소련 백과사전
좌표 방법, 즉 숫자나 기타 기호를 사용하여 점이나 몸체의 위치를 결정하는 방법을 구현하는 정의 집합입니다. 특정 지점의 위치를 결정하는 숫자 집합을 이 지점의 좌표라고 합니다. 에서... ... 위키피디아
데카르트 시스템- Dekarto koordinačių sistema statusas T sritis fizika atitikmenys: engl. 데카르트 시스템; 데카르트 좌표계 vok. 카르테시스 Koordinatensystem, n; Kartesisches Koordinatensystem, n rus. 데카르트 시스템, f; 데카르트 시스템... ... Fizikos terminų žodynas
좌표계- 직선, 평면, 공간에서 점의 위치를 결정하는 일련의 조건입니다. 다양한 구형 형태가 있습니다: 직교형, 경사형, 원통형, 구형, 곡선형 등. 위치를 결정하는 선형 및 각도량... ... 대형 폴리테크닉 백과사전
유클리드 공간의 직교직선 좌표계. D.p.s. 평면의 는 서로 수직인 두 개의 직선 좌표축으로 지정되며, 각 축에는 양의 방향이 선택되고 단위 세그먼트는 ... 수학백과사전
직각좌표계는 평면이나 공간상에서 서로 수직인 축을 갖는 직선 좌표계입니다. 가장 단순하고 따라서 가장 일반적으로 사용되는 좌표계입니다. 매우 쉽고 직접적으로 요약된 내용은... ... Wikipedia
서적
- 전산유체역학. 이론적 기초. 교과서, Pavlovsky Valery Alekseevich, Nikushchenko Dmitry Vladimirovich. 이 책은 체계적으로 소개하는 데 중점을 두고 있습니다. 이론적 기초작업 설정을 위해 수학적 모델링액체와 기체의 흐름. 건설 문제에 특별한 관심을 기울이고 있습니다.
공통 원점(좌표의 원점)과 공통 길이 단위를 사용하여 서로 수직인 2개 또는 3개의 교차 축으로 구성된 정렬 시스템을 호출합니다. 직사각형 직교 좌표계 .
일반 직교 좌표계 (아핀 좌표계)에는 반드시 수직 축이 포함될 필요는 없습니다. 프랑스 수학자 르네 데카르트(1596-1662)를 기리기 위해 공통 길이 단위가 모든 축에서 측정되고 축이 직선인 좌표계의 이름이 지정되었습니다.
평면 위의 직사각형 직교 좌표계 두 개의 축이 있고 공간의 직사각형 직교 좌표계 - 세 개의 축. 평면이나 공간의 각 점은 순서가 지정된 좌표 집합(좌표계의 길이 단위에 해당하는 숫자)으로 정의됩니다.
정의에 따르면 다음과 같이 직선, 즉 1차원에 직교 좌표계가 있습니다. 선에 데카르트 좌표를 도입하는 것은 선의 모든 점을 잘 정의된 실수, 즉 좌표와 연관시키는 방법 중 하나입니다.
르네 데카르트의 작품에서 등장한 좌표법은 모든 수학의 혁명적인 재구성을 표시했습니다. 해석이 가능해졌습니다 대수 방정식(또는 부등식)을 기하학적 이미지(그래프) 형태로 표현하고, 반대로 분석 공식과 방정식 시스템을 사용하여 기하학적 문제에 대한 해결책을 찾습니다. 응, 불평등 지 < 3 геометрически означает полупространство, лежащее ниже плоскости, параллельной координатной плоскости xOy이 평면 위에 3단위만큼 위치합니다.
데카르트 좌표계를 사용하면 주어진 곡선에서 한 점의 소속 여부는 숫자가 다음과 같다는 사실에 해당합니다. 엑스그리고 와이어떤 방정식을 만족시키세요. 따라서 중심이 있는 원 위의 한 점의 좌표는 다음과 같습니다. 주어진 포인트 (ㅏ; 비) 방정식을 만족 (엑스 - ㅏ)² + ( 와이 - 비)² = 아르 자형² .
평면 위의 직사각형 직교 좌표계
공통 원점과 동일한 축척 단위 형식을 갖는 평면 위의 두 개의 수직 축 평면의 직각좌표계 . 이 축 중 하나를 축이라고 합니다. 황소, 또는 x축 , 다른 하나 - 축 아야, 또는 y축 . 이러한 축을 좌표축이라고도 합니다. 다음으로 나타내자 중엑스그리고 중와이각각 임의의 점의 투영 중축에 황소그리고 아야. 예측을 얻는 방법은 무엇입니까? 요점을 지나자 중 황소. 이 직선은 축과 교차합니다 황소그 시점에 중엑스. 요점을 지나자 중축에 수직인 직선 아야. 이 직선은 축과 교차합니다 아야그 시점에 중와이. 이는 아래 그림에 나와 있습니다.
엑스그리고 와이포인트들 중그에 따라 방향이 지정된 세그먼트의 값을 호출합니다. 옴엑스그리고 옴와이. 이러한 방향 세그먼트의 값은 다음과 같이 계산됩니다. 엑스 = 엑스0 - 0 그리고 와이 = 와이0 - 0 . 데카르트 좌표 엑스그리고 와이포인트들 중 횡좌표 그리고 세로좌표 . 점이라는 사실은 중좌표가 있습니다 엑스그리고 와이는 다음과 같이 표시됩니다. 중(엑스, 와이) .
좌표축은 평면을 4개로 나눕니다. 사분면 , 그 번호는 아래 그림에 나와 있습니다. 또한 특정 사분면에서의 위치에 따라 점 좌표에 대한 기호 배열을 보여줍니다.
평면상의 직각좌표 외에 극좌표계도 종종 고려됩니다. 한 좌표계에서 다른 좌표계로 전환하는 방법에 대해 - 수업에서 극좌표계 .

공간의 직사각형 직교 좌표계
공간의 직교 좌표는 평면의 직교 좌표와 완전히 유사하게 도입됩니다.
공통 원점을 갖는 공간상의 서로 수직인 3개의 축(좌표축) 영형동일한 규모 단위로 형성됩니다. 공간의 직각좌표계 .
이 축 중 하나를 축이라고 합니다. 황소, 또는 x축 , 다른 하나 - 축 아야, 또는 y축 , 세 번째 축 온스, 또는 축 적용 . 허락하다 중엑스, 중와이 중지- 임의의 점 투영 중축의 공간 황소 , 아야그리고 온스각기.
요점을 통과하자 중 황소황소그 시점에 중엑스. 요점을 지나자 중축에 수직인 평면 아야. 이 평면은 축과 교차합니다 아야그 시점에 중와이. 요점을 지나자 중축에 수직인 평면 온스. 이 평면은 축과 교차합니다 온스그 시점에 중지.
데카르트 직교좌표 엑스 , 와이그리고 지포인트들 중그에 따라 방향이 지정된 세그먼트의 값을 호출합니다. 옴엑스, 옴와이그리고 옴지. 이러한 방향 세그먼트의 값은 다음과 같이 계산됩니다. 엑스 = 엑스0 - 0 , 와이 = 와이0 - 0 그리고 지 = 지0 - 0 .
데카르트 좌표 엑스 , 와이그리고 지포인트들 중그에 따라 호출됩니다 횡좌표 , 세로좌표 그리고 신청하다 .
쌍으로 취해진 좌표축은 좌표 평면에 위치합니다. xOy , yOz그리고 zOx .
데카르트 좌표계의 점에 관한 문제
예시 1.
ㅏ(2; -3) ;
비(3; -1) ;
씨(-5; 1) .
이 점들을 가로축에 투영한 좌표를 찾으세요.
해결책. 이 단원의 이론적 부분에서 다음과 같이 가로좌표 축에 대한 점 투영은 가로축 자체, 즉 축에 위치합니다. 황소, 따라서 점 자체의 가로좌표와 동일한 가로좌표와 세로좌표(축의 좌표)를 갖습니다. 아야, x축은 점 0에서 교차하며 이는 0과 같습니다. 따라서 x축에서 이러한 점의 다음 좌표를 얻습니다.
ㅏx(2;0);
비x(3;0);
씨x (-5; 0).
예시 2.데카르트 좌표계에서는 점들이 평면에 주어집니다.
ㅏ(-3; 2) ;
비(-5; 1) ;
씨(3; -2) .
이 점들을 세로축에 투영한 좌표를 찾으세요.
해결책. 이 단원의 이론적 부분에서 다음과 같이 세로축에 대한 점 투영은 세로축 자체, 즉 축에 위치합니다. 아야, 따라서 점 자체의 세로 좌표와 동일한 세로 좌표와 가로 좌표(축의 좌표)를 갖습니다. 황소, 세로축이 점 0에서 교차하며 이는 0과 같습니다. 따라서 세로축에서 이러한 점의 다음 좌표를 얻습니다.
ㅏ와이(0;2);
비와이(0;1);
씨와이(0;-2).
예시 3.데카르트 좌표계에서는 점들이 평면에 주어집니다.
ㅏ(2; 3) ;
비(-3; 2) ;
씨(-1; -1) .
황소 .
황소 황소 황소, 주어진 점과 동일한 가로좌표를 가지며, 세로좌표는 주어진 점의 세로좌표와 절대값이 같고 부호는 반대입니다. 따라서 우리는 축을 기준으로 이러한 점에 대칭인 점의 다음 좌표를 얻습니다. 황소 :
ㅏ"(2; -3) ;
비"(-3; -2) ;
씨"(-1; 1) .
직교 좌표계를 사용하여 문제를 직접 해결하고 솔루션을 살펴보세요.
예시 4.점이 위치할 수 있는 사분면(4분면, 사분면으로 그리기 - "평면의 직교 직교 좌표계" 단락 끝 부분)을 결정합니다. 중(엑스; 와이) , 만약에
1) xy > 0 ;
2) xy < 0 ;
3) 엑스 − 와이 = 0 ;
4) 엑스 + 와이 = 0 ;
5) 엑스 + 와이 > 0 ;
6) 엑스 + 와이 < 0 ;
7) 엑스 − 와이 > 0 ;
8) 엑스 − 와이 < 0 .
실시예 5.데카르트 좌표계에서는 점들이 평면에 주어집니다.
ㅏ(-2; 5) ;
비(3; -5) ;
씨(ㅏ; 비) .
축을 기준으로 이 점에 대칭인 점의 좌표를 찾습니다. 아야 .
계속해서 함께 문제를 해결해 나가자
실시예 6.데카르트 좌표계에서는 점들이 평면에 주어집니다.
ㅏ(-1; 2) ;
비(3; -1) ;
씨(-2; -2) .
축을 기준으로 이 점에 대칭인 점의 좌표를 찾습니다. 아야 .
해결책. 축을 중심으로 180도 회전 아야축의 방향 세그먼트 아야여기까지. 평면의 사분면이 표시된 그림에서 축을 기준으로 주어진 점과 대칭인 점을 볼 수 있습니다. 아야, 주어진 점과 동일한 세로 좌표를 가지며, 가로 좌표는 주어진 점의 가로 좌표와 절대값이 같고 부호는 반대입니다. 따라서 우리는 축을 기준으로 이러한 점에 대칭인 점의 다음 좌표를 얻습니다. 아야 :
ㅏ"(1; 2) ;
비"(-3; -1) ;
씨"(2; -2) .
실시예 7.데카르트 좌표계에서는 점들이 평면에 주어집니다.
ㅏ(3; 3) ;
비(2; -4) ;
씨(-2; 1) .
원점을 기준으로 이들 점에 대칭인 점의 좌표를 찾습니다.
해결책. 원점에서 주어진 점으로 향하는 방향 세그먼트를 원점을 중심으로 180도 회전합니다. 평면의 사분면이 표시된 그림에서 좌표 원점을 기준으로 주어진 점에 대칭인 점은 주어진 점의 가로좌표 및 세로좌표와 절대값이 동일한 가로좌표 및 세로좌표를 갖지만 기호 반대. 따라서 원점을 기준으로 이러한 점에 대칭인 점의 다음 좌표를 얻습니다.
ㅏ"(-3; -3) ;
비"(-2; 4) ;
씨(2; -1) .
실시예 8.
ㅏ(4; 3; 5) ;
비(-3; 2; 1) ;
씨(2; -3; 0) .
다음 점의 투영 좌표를 찾으십시오.
1) 비행기에서 옥시 ;
2) 비행기에서 옥스 ;
3) 비행기로 오이즈 ;
4) 가로축;
5) 세로축;
6) 해당 축에서.
1) 평면에 점 투영 옥시이 평면 자체에 위치하므로 주어진 점의 가로좌표 및 세로좌표와 동일한 가로좌표 및 세로좌표가 있고 0과 동일한 아플리케이트가 있습니다. 그래서 우리는 이 점들의 투영에 대한 다음 좌표를 얻습니다. 옥시 :
ㅏxy(4; 3; 0);
비xy(-3; 2; 0);
씨XY(2;-3;0).
2) 평면에 점 투영 옥스이 평면 자체에 위치하므로 가로좌표 및 적용은 주어진 점의 가로 및 적용과 동일하고 세로 좌표는 0과 같습니다. 그래서 우리는 이 점들의 투영에 대한 다음 좌표를 얻습니다. 옥스 :
ㅏxz (4; 0; 5);
비xz(-3; 0; 1);
씨xz (2; 0; 0).
3) 평면에 점 투영 오이즈이 평면 자체에 위치하므로 주어진 점의 세로 좌표 및 적용과 동일한 세로 좌표와 적용 및 가로 좌표가 0과 같습니다. 그래서 우리는 이 점들의 투영에 대한 다음 좌표를 얻습니다. 오이즈 :
ㅏyz(0; 3; 5);
비yz (0; 2; 1);
씨yz(0; -3; 0).
4) 이 강의의 이론적 부분에서 다음과 같이 가로좌표 축에 대한 점 투영은 가로축 자체, 즉 축에 위치합니다. 황소, 따라서 가로좌표는 점 자체의 가로좌표와 같고 투영의 세로좌표와 적용축은 0과 같습니다(세로좌표와 적용축이 점 0에서 가로좌표와 교차하기 때문에). 우리는 가로축에 대한 이러한 점의 투영에 대한 다음 좌표를 얻습니다.
ㅏx(4;0;0);
비x (-3; 0; 0);
씨x(2;0;0).
5) 세로축에 대한 점 투영은 세로축 자체, 즉 축에 위치합니다. 아야, 따라서 세로 좌표는 점 자체의 세로 좌표와 동일하고 투영의 가로 좌표 및 적용 축은 0과 같습니다(가로 좌표 및 적용 축이 포인트 0에서 세로 좌표 축과 교차하므로). 우리는 이 점들을 세로축에 투영하여 다음 좌표를 얻습니다.
ㅏ와이(0; 3; 0);
비와이(0; 2; 0);
씨와이(0;-3;0).
6) 적용 축에 대한 점 투영은 적용 축 자체, 즉 축에 위치합니다. 온스, 따라서 점 자체의 적용축과 동일한 적용축을 가지며 투영의 가로좌표와 세로좌표는 0과 같습니다(횡축과 세로축이 점 0에서 적용축과 교차하기 때문에). 우리는 해당 축에 대한 이러한 점의 투영에 대한 다음 좌표를 얻습니다.
ㅏz (0; 0; 5);
비z (0; 0; 1);
씨z(0; 0; 0).
실시예 9.데카르트 좌표계에서는 점들이 공간에 주어집니다.
ㅏ(2; 3; 1) ;
비(5; -3; 2) ;
씨(-3; 2; -1) .
다음과 관련하여 이 점에 대칭인 점의 좌표를 찾습니다.
1) 비행기 옥시 ;
2) 비행기 옥스 ;
3) 비행기 오이즈 ;
4) 가로축;
5) 세로축;
6) 축을 적용한다;
7) 좌표의 원점.
1) 축 반대편의 점을 “이동”합니다. 옥시 옥시, 가로좌표 및 세로좌표는 주어진 점의 가로좌표 및 세로좌표와 동일하며, 크기는 주어진 점의 정점과 동일하지만 부호는 반대인 아플리케이트를 갖습니다. 따라서 우리는 평면을 기준으로 데이터에 대칭인 다음 점 좌표를 얻습니다. 옥시 :
ㅏ"(2; 3; -1) ;
비"(5; -3; -2) ;
씨"(-3; 2; 1) .
2) 축 반대편의 점을 “이동”합니다. 옥스같은 거리로. 좌표 공간을 표시하는 그림에서 축을 기준으로 주어진 점과 대칭인 점을 볼 수 있습니다. 옥스, 가로좌표 및 아플리케이트는 주어진 점의 가로좌표 및 아플리케이트와 동일하며, 세로좌표는 주어진 점의 세로좌표와 크기는 동일하지만 부호는 반대입니다. 따라서 우리는 평면을 기준으로 데이터에 대칭인 다음 점 좌표를 얻습니다. 옥스 :
ㅏ"(2; -3; 1) ;
비"(5; 3; 2) ;
씨"(-3; -2; -1) .
3) 축 반대편의 점을 “이동”합니다. 오이즈같은 거리로. 좌표 공간을 표시하는 그림에서 축을 기준으로 주어진 점과 대칭인 점을 볼 수 있습니다. 오이즈, 주어진 점의 세로 좌표 및 세로 좌표와 동일한 세로 좌표 및 세로 좌표와 주어진 포인트의 가로 좌표와 값이 동일하지만 부호가 반대인 가로 좌표를 갖습니다. 따라서 우리는 평면을 기준으로 데이터에 대칭인 다음 점 좌표를 얻습니다. 오이즈 :
ㅏ"(-2; 3; 1) ;
비"(-5; -3; 2) ;
씨"(3; 2; -1) .
평면 위의 대칭 점과 평면을 기준으로 데이터에 대칭인 공간 점과 유사하게 공간의 데카르트 좌표계의 일부 축에 대한 대칭의 경우 축의 좌표는 대칭이 부여된 부호는 유지되며 다른 두 축의 좌표는 주어진 점의 좌표와 절대값이 동일하지만 부호는 반대입니다.
4) 가로좌표의 부호는 유지되나, 세로좌표와 적용자는 부호가 변경됩니다. 따라서 가로축을 기준으로 데이터에 대칭인 다음 점 좌표를 얻습니다.
ㅏ"(2; -3; -1) ;
비"(5; 3; -2) ;
씨"(-3; -2; 1) .
5) 세로좌표는 부호를 유지하고, 가로좌표와 적용자는 부호를 변경합니다. 따라서 세로축을 기준으로 데이터에 대칭인 다음 점 좌표를 얻습니다.
ㅏ"(-2; 3; -1) ;
비"(-5; -3; -2) ;
씨"(3; 2; 1) .
6) 지원자의 부호는 그대로 유지되나, 가로좌표와 세로좌표의 부호는 변경됩니다. 따라서 우리는 해당 축을 기준으로 데이터에 대칭인 다음 점 좌표를 얻습니다.
ㅏ"(-2; -3; 1) ;
비"(-5; 3; 2) ;
씨"(3; -2; -1) .
7) 평면 위의 점의 경우 대칭과 유사하게 좌표 원점에 대한 대칭의 경우 주어진 점에 대칭인 점의 모든 좌표는 주어진 점의 좌표와 절대값이 동일합니다. 그러나 기호는 그 반대입니다. 따라서 원점을 기준으로 데이터에 대칭인 다음 점 좌표를 얻습니다.
), 이를 통해 천구의 발광체 및 보조 지점의 위치가 결정됩니다. 천문학에서는 다양한 천체 좌표계가 사용됩니다. 이들 각각은 기본적으로 적절하게 선택된 기본 평면과 원점을 갖는 구면 좌표계(방사형 좌표계 없음)입니다. 기본 평면의 선택에 따라 천체 좌표계는 수평(수평면), 적도(적도 평면), 황도(황도 평면) 또는 은하(은하 평면)라고 합니다.
평면과 공간의 좌표는 무한대로 입력 가능 다른 방법들. 좌표법을 사용하여 특정 수학적 또는 물리적 문제를 해결할 때 다양한 좌표계를 사용하여 이 특정 경우에 문제가 더 쉽고 편리하게 해결되는 좌표계를 선택할 수 있습니다. 좌표계의 잘 알려진 일반화는 기준 시스템과 기준 시스템입니다.
백과사전 유튜브
1 / 5
데카르트 좌표계의 모델.
기하학 11학년 - 공간의 직각좌표계
좌표평면 ➽ 대수7학년 ➽ 영상수업
비디오 튜토리얼 "극좌표계"
공간의 직사각형 좌표계. 벡터 좌표. 11학년 기하학에 관한 비디오 강의
자막
기본 시스템
이 섹션에서는 초등 수학에서 가장 일반적으로 사용되는 좌표계에 대한 설명을 제공합니다.
데카르트 좌표
포인트 위치 피비행기에서 결정 데카르트 좌표몇 개의 숫자를 사용하여 (x, y) : (\디스플레이스타일 (x,y):)
우주에서는 이미 3개의 좌표가 필요합니다. (x , y , z) : (\displaystyle (x,y,z):)
극좌표
안에 극좌표계, 평면에 적용, 점의 위치 피원점까지의 거리에 따라 결정됩니다. 아르 자형= |OP| 축에 대한 반경 벡터의 각도 ψ 황소 .
우주에서는 극좌표의 일반화가 사용됩니다. 원통형그리고 구의좌표계.
원통형 좌표
원통형 좌표- 극성의 3차원 유사체. 피삼중으로 주문한 것 같습니다 (r, ψ, z) . (\displaystyle (r,\varphi ,z).)
참고: 문헌에서 ρ 지정은 때때로 첫 번째(방사형) 좌표에 사용되고, θ 지정은 두 번째(각 또는 방위각) 좌표에, θ 지정은 세 번째 좌표에 사용됩니다. 시간 .극좌표에는 한 가지 단점이 있습니다. 아르 자형 = 0 .
원통형 좌표는 일부 축을 기준으로 대칭인 시스템을 연구하는 데 유용합니다. 예를 들어, 반경이 있는 긴 원통 아르 자형데카르트 좌표(축 포함) 지, 실린더 축과 일치) 방정식은 다음과 같습니다. x 2 + y 2 = R 2 , (\displaystyle x^(2)+y^(2)=R^(2),)원통형 좌표에서는 다음과 같이 훨씬 단순해 보입니다. 아르 자형 = 아르 자형 .
구형 좌표
구형 좌표-극성의 3차원 유사체.
구좌표계에서 점의 위치는 다음과 같습니다. 피세 가지 구성 요소에 의해 결정됩니다. (ρ, ψ, θ) . (\displaystyle (\rho ,\varphi ,\theta).)데카르트 좌표계의 관점에서,
참고: 문헌에서는 방위각을 θ로 표시하고 극각을 ψ로 표시하는 경우가 있습니다. 때때로 방사형 좌표에 사용됨 아르 자형ρ 대신. 또한 방위각에 대한 각도 범위는 범위 대신 (-180°, +180°]로 선택될 수 있습니다. 때로는 트리플의 좌표 순서가 설명된 것과 다르게 선택됩니다. 예를 들어 극각과 방위각을 바꿀 수 있습니다.구좌표계에는 단점도 있습니다. ρ = 0이면 ψ와 θ가 정의되지 않습니다. 각도 Φ는 경계값 θ = 0 및 θ = 180°(또는 이 각도에 대한 적절한 범위가 채택된 경우 θ = ±90°)에 대해 정의되지 않습니다.
점을 그리려면 피구면 좌표에 따르면 양의 반축을 따라 극에서 필요합니다. 지ρ와 동일한 세그먼트를 따로 설정하고 축을 중심으로 각도 θ만큼 회전합니다. 와이 엑스, 축을 중심으로 각도 θ만큼 회전합니다. 지양의 반축 방향으로 와이 .
구면 좌표는 점을 기준으로 대칭인 시스템을 연구하는 데 유용합니다. 따라서 반지름이 있는 구의 방정식은 아르 자형구의 중심을 원점으로 하는 데카르트 좌표는 다음과 같습니다. x 2 + y 2 + z 2 = R 2 , (\displaystyle x^(2)+y^(2)+z^(2)=R^(2),)반면 구형 좌표에서는 훨씬 간단해집니다. ρ = R. (\디스플레이스타일\rho =R.)
기타 일반적인 좌표계
- Affine (사선) 좌표계- 아핀 공간의 직선 좌표계. 평면에서는 좌표의 원점으로 지정됩니다. 에 대한아핀 기저를 나타내는 두 개의 정렬된 비공선형 벡터입니다. 이 경우 좌표축은 기저 벡터와 평행한 원점을 통과하는 직선이며, 이는 축의 양의 방향을 지정합니다. 따라서 3차원 공간에서 아핀 좌표계는 3개의 선형 독립 벡터와 원점으로 정의됩니다. 특정 지점의 좌표를 결정하려면 중벡터 확장 계수가 계산됩니다. 옴기본 벡터로.
- 무게중심 좌표삼각형의 꼭지점에 위치한 질량 중심 문제를 해결한 A. Moebius가 1827년에 처음 소개했습니다. 그들은 아핀 불변이며 다음을 나타냅니다. 특별한 경우일반적인 동차좌표. 무게 중심 좌표가 있는 지점은 다음 위치에 있습니다. N-차원 벡터 공간 엔, 좌표 자체는 ( N−1)차원 부분공간. 무게 중심 좌표는 단순 점과 관련된 대수 위상수학에서도 사용됩니다.
- 쌍각좌표- 이중심 좌표의 특별한 경우, 두 개의 고정점으로 정의된 평면 위의 좌표계 와 함께 1과 와 함께 2, 가로축 역할을 하는 직선이 그려집니다. 어떤 지점의 위치 피이 선 위에 있지 않은 는 각도에 의해 결정됩니다. PC 1 씨 2 및 PC 2 씨 1 .
- 양극 좌표이 경우 극점이 있는 두 개의 원군이 평면에서 좌표선 역할을 한다는 사실이 특징입니다. ㅏ그리고 비, 그리고 그들과 직교하는 원군도 마찬가지입니다. 양극 좌표를 데카르트 직각 좌표로 변환하는 작업은 특수 공식을 사용하여 수행됩니다. 공간의 양극 좌표를 쌍구형이라고 합니다. 이 경우 좌표 표면은 구, 원호의 회전으로 형성된 표면 및 축을 통과하는 반평면입니다. 오즈 .
- 이중심 좌표- 두 가지를 기반으로 하는 모든 좌표계 고정점그리고 그 안에서 다른 지점의 위치는 일반적으로 제거 정도에 따라 결정되거나 일반적으로 이 두 주요 지점에 대한 위치에 따라 결정됩니다. 이런 종류의 시스템은 특정 분야에서 매우 유용할 수 있습니다. 과학적 연구.
- 이중원통형 좌표- 평면상의 양극좌표계인 경우에 형성되는 좌표계 옥시축에 평행 오즈. 이 경우 좌표 표면은 평면뿐만 아니라 축이 평행한 원형 원통 그룹, 이에 직교하는 원형 원통 그룹입니다. 이원통형 좌표를 3차원 공간의 데카르트 직각 좌표로 변환하려면 특수 공식도 사용됩니다.
- 원추 좌표- 반경으로 표시되는 동심 구와 축을 따라 위치한 두 개의 수직 원뿔군으로 구성된 3차원 직교 좌표계 엑스그리고 지 .
- 린들러의 좌표주로 상대성 이론의 틀 내에서 사용되며 일반적으로 민코프스키 공간(Minkowski space)이라고 불리는 평평한 시공간 부분을 설명합니다. 특수 상대성 이론에서는 균일하게 가속되는 입자가 쌍곡선 운동을 하고 있으며, Rindler 좌표계의 각 입자에 대해 해당 입자가 정지해 있는 기준점을 선택할 수 있습니다.
- 포물선 좌표좌표선이 공초점 포물선의 집합인 2차원 직교 좌표계입니다. 포물선 좌표의 3차원 수정은 이러한 포물선의 대칭 축을 중심으로 2차원 시스템을 회전하여 구성됩니다. 포물선 좌표는 특정 범위의 실제 적용 가능성도 있습니다. 특히 스타크 효과와 관련하여 사용할 수 있습니다. 포물선 좌표는 특정 방식으로 직사각형 직교 좌표와 관련됩니다.
- 사영좌표이름에 따르면 투영 공간 P에 존재합니다. N (에게) 해당 요소와 신체 요소의 유한 하위 집합 클래스 간의 일대일 대응을 나타냅니다. 에게, 동등성과 순서의 속성이 특징입니다. 투영 부분공간의 투영 좌표를 결정하려면 투영 공간에서 해당 점의 좌표를 결정하는 것으로 충분합니다. 일반적인 경우, 일부 기준과 관련하여 투영 좌표는 순전히 투영 수단으로 도입됩니다.
- 원환형 좌표계- 두 초점을 분리하는 축을 중심으로 2차원 양극 좌표계를 회전하여 얻은 3차원 직교 좌표계입니다. 따라서 양극성 시스템의 초점은 반경이 있는 고리로 변합니다. ㅏ, 비행기에 누워 xy토로이드 좌표계, 축 지시스템의 회전축이 됩니다. 초점 고리는 때때로 기본 원이라고도 합니다.
- 삼선형 좌표동질 좌표의 예 중 하나이며 주어진 삼각형을 기반으로 하므로 특정 점의 위치는 이 삼각형의 측면을 기준으로 결정됩니다. 다른 변형도 가능하지만 주로 거리 정도에 따라 결정됩니다. 삼선형 좌표는 비교적 쉽게 무게중심 좌표로 변환될 수 있습니다. 또한 해당 공식이 사용되는 2차원 직교 좌표로 변환할 수도 있습니다.
- 원통형 포물선 좌표- 2차원 포물선 좌표계의 공간 변환 결과로 얻은 3차원 직교 좌표계입니다. 따라서 좌표 표면은 공초점 포물선 원통입니다. 원통형 포물선 좌표는 직각 좌표와 특정 관계를 가지며 다양한 과학 연구 분야에서 사용될 수 있습니다.
- 타원체 좌표- 공간의 타원 좌표. 이 경우 좌표 표면은 타원체, 단일 시트 쌍곡면 및 이중 시트 쌍곡면이며 중심이 원점에 위치합니다. 시스템은 직교합니다. 타원체 좌표인 각 세 개의 숫자는 시스템 평면을 기준으로 하는 8개의 점에 해당합니다. 옥시즈서로 대칭입니다.
한 좌표계에서 다른 좌표계로 전환
데카르트 및 극좌표
어디 유 0 - 헤비사이드 기능 u 0 (0) = 0 , (\displaystyle u_(0)(0)=0,) sgn은 signum 함수입니다. 기능은 다음과 같습니다. 유 0과 sgn은 프로그래밍 언어의 "if...else" 문과 의미가 유사한 "논리적" 스위치로 사용됩니다. 일부 프로그래밍 언어에는 특별한 atan2 함수( 와이 , 엑스), 이는 좌표로 정의된 필수 사분면에서 올바른 Φ를 반환합니다. 엑스그리고 와이 .