Декартова координатна система: основни понятия и примери.
Координатният метод, разбира се, е много добър, но в реалните задачи на C2 няма координати или вектори. Следователно те ще трябва да бъдат въведени. Да, да, вземете го така и го въведете: посочете началото, единичния сегмент и посоката на осите x, y и z.
Най-забележителното свойство на този метод е, че няма значение как точно се въвежда координатната система. Ако всички изчисления са правилни, тогава отговорът ще бъде правилен.
Координати на куба
Ако задача C2 съдържа куб, считайте се за късметлия. Това е най-простият многостен, всички двустенни ъгли на който са равни на 90 °.
Координатната система също е много проста за въвеждане:
- Началото на координатите е в точка А;
- Най-често ръбът на куба не е посочен, така че го приемаме като единичен сегмент;
- Оста x е насочена по ръба AB, y - по ръба AD, а оста z - по ръба AA 1.
Моля, обърнете внимание: оста z сочи нагоре! След двуизмерен координатни системиТова е малко необичайно, но всъщност много логично.
Сега всеки връх на куба има координати. Нека ги съберем в таблица - отделно за долната равнина на куба:
Лесно се забелязва, че точките от горната равнина се различават от съответните точки от долната равнина само по z координатата. Например B = (1; 0; 0), B 1 = (1; 0; 1). Основното нещо е да не се объркате!
Prism вече е много по-забавен. С правилния подход е достатъчно да знаете координатите само на долната основа - горната ще бъде изчислена автоматично.
Проблеми C2 включват изключително правилни триъгълни призми (прави призми с правилен триъгълник в основата им). При тях координатната система се въвежда почти по същия начин, както при куба. Между другото, ако някой не знае, кубът също е призма, само че тетраедърна.
Така че, да тръгваме! Представяме координатната система:
- Началото на координатите е в точка А;
- Ние приемаме страната на призмата като единичен сегмент, освен ако не е посочено друго в изложението на проблема;
- Насочваме оста x по ръба AB, z - по ръба AA 1 и позиционираме оста y така, че равнината OXY да съвпада с основната равнина ABC.
Тук е необходимо известно уточнение. Факт е, че оста y НЕ съвпада с ръба AC, както много хора вярват. Защо не съвпада? Помислете сами: триъгълникът ABC е равностранен, всички ъгли в него са 60°. А ъглите между координатните оси трябва да са 90°, така че горната снимка ще изглежда така:

Надявам се, че вече е ясно защо оста y няма да минава покрай AC. Нека начертаем височината CH в този триъгълник. Триъгълник ACH е правоъгълен триъгълник и AC = 1, така че AH = 1 · cos A = cos 60°; CH = 1 sin A = sin 60°. Тези факти са необходими за изчисляване на координатите на точка C.
Сега нека да разгледаме цялата призма заедно с конструираната координатна система:

Получаваме следните координати на точките:

Както виждаме, точките на горната основа на призмата отново се различават от съответните точки на долната само по z координатата. Основният проблем са точките C и C 1. Те имат ирационални координати, които просто трябва да запомните. Е, или разберете откъде идват.
Координати на шестоъгълна призма
Шестоъгълната призма е „клонирана“ триъгълна. Можете да разберете как се случва това, ако погледнете долната основа – нека я наречем ABCDEF. Нека изпълним допълнителни конструкции: отсечки AD, BE и CF. Резултатът е шест триъгълника, всеки от които (например триъгълник ABO) е основа за тристенна призма.

Сега нека представим самата координатна система. Началото на координатите - точка O - ще бъде поставено в центъра на симетрия на шестоъгълника ABCDEF. Оста x ще минава покрай FC, а оста y ще минава през средните точки на сегменти AB и DE. Получаваме тази снимка:

Моля, обърнете внимание: началото НЕ съвпада с върха на многостена! Всъщност, когато решавате реални проблеми, ще откриете, че това е много удобно, защото може значително да намали обема на изчисленията.
Всичко, което остава, е да добавим оста z. Според традицията го рисуваме перпендикулярно на равнината OXY и го насочваме вертикално нагоре. Получаваме крайната картина:

Нека сега запишем координатите на точките. Да приемем, че всички ръбове на нашата правилна шестоъгълна призма са равни на 1. И така, координатите на долната основа са:
Координатите на горната основа се изместват с единица по оста z:
Пирамидата като цяло е много сурова. Ще анализираме само най-простия случай - правилна четириъгълна пирамида, всички ръбове на която са равни на единица. Въпреки това, в реални задачи C2, дължините на ръбовете могат да се различават, така че общата схема за изчисляване на координатите е дадена по-долу.
И така, правилна четириъгълна пирамида. Това е същото като Хеопс, само малко по-малко. Нека го обозначим като SABCD, където S е връх. Нека въведем координатна система: началото е в точка A, единичната отсечка AB = 1, оста x е насочена по дължината на AB, оста y е насочена по дължината на AD, а оста z е насочена нагоре, перпендикулярно на равнината OXY . За по-нататъшни изчисления се нуждаем от височината SH - така че ще я изградим. Получаваме следната картина:

Сега нека намерим координатите на точките. Първо, нека да разгледаме самолета OXY. Тук всичко е просто: основата е квадрат, координатите му са известни. Проблеми възникват с точка S. Тъй като SH е височината до равнината OXY, точките S и H се различават само по z координатата. Всъщност дължината на сегмента SH е z координатата за точка S, тъй като H = (0,5; 0,5; 0).
забележи това триъгълници ABCи ASC са равни от три страни (AS = CS = AB = CB = 1, а страната AC е обща). Следователно SH = BH. Но BH е половината от диагонала на квадрата ABCD, т.е. BH = AB sin 45°. Получаваме координатите на всички точки:
Това е всичко с координатите на пирамидата. Но изобщо не с координати. Разгледахме само най-често срещаните полиедри, но тези примери са достатъчни, за да изчислим независимо координатите на всякакви други фигури. Следователно можем да продължим всъщност към методите за решаване на конкретни проблеми C2.
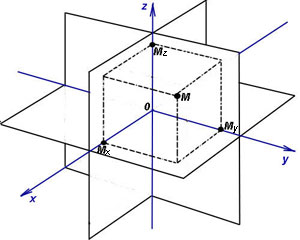
За да определим позицията на точка в пространството, ще използваме декартови правоъгълни координати (фиг. 2).
Декартовата правоъгълна координатна система в пространството се образува от три взаимно перпендикулярни координатни оси OX, OY, OZ. Координатните оси се пресичат в точка O, която се нарича начало, на всяка ос е избрана положителна посока, обозначена със стрелки, и мерна единица за сегментите на осите. Мерните единици обикновено (не непременно) са еднакви за всички оси. Оста OX се нарича абсцисна ос (или просто абциса), оста OY е ординатната ос, а оста OZ е приложимата ос.
Положението на точка А в пространството се определя от три координати x, y и z. Координатата x е равна на дължината на сегмента OB, координатата y е дължината на сегмента OC, координатата z е дължината на сегмента OD в избраните мерни единици. Отсечките OB, OC и OD се определят от равнини, начертани от точка, успоредна съответно на равнините YOZ, XOZ и XOY.
Координатата x се нарича абсцисата на точка А, координатата y се нарича ордината на точка А, а координатата z се нарича апликация на точка А.
Символично се изписва така:
или свържете координатен запис към конкретна точка с помощта на индекс:
x A, y A, z A,

Всяка ос се разглежда като числова права, т.е. има положителна посока и точките, лежащи на отрицателния лъч, са присвоени отрицателни стойностикоординати (разстоянието се взема със знак минус). Тоест, ако например точка B лежи не както на фигурата - върху лъча OX, а върху неговото продължение в обратна странаот точка O (на отрицателната част на оста OX), тогава абсцисата x на точка A ще бъде отрицателна (минус разстоянието OB). По същия начин и за другите две оси.
Координатните оси OX, OY, OZ, показани на фиг. 2, образуват дясна координатна система. Това означава, че ако погледнете равнината YOZ по положителната посока на оста OX, тогава движението на оста OY към оста OZ ще бъде по посока на часовниковата стрелка. Тази ситуация може да се опише с помощта на правилото на гимлет: ако гимлетът (винт с дясна резба) се завърти в посока от оста OY към оста OZ, тогава той ще се движи по положителната посока на оста OX.
Вектори с единична дължина, насочени по координатните оси, се наричат координатни единични вектори. Те обикновено се обозначават като  (фиг. 3). Там е и обозначението
(фиг. 3). Там е и обозначението  Единичните вектори формират основата на координатната система.
Единичните вектори формират основата на координатната система.
В случай на дясна координатна система са валидни следните формули с векторни произведения на единични вектори:

Правоъгълна координатна система в равнина се образува от две взаимно перпендикулярни координатни оси X’X и Y’Y. Координатните оси се пресичат в точка O, която се нарича начало, на всяка ос се избира положителна посока. Положителната посока на осите (в дясна координатна система) се избира така, че когато оста X'X се върти обратно на часовниковата стрелка на 90°, положителната му посока съвпада с положителната посока на оста Y'Y. Четирите ъгъла (I, II, III, IV), образувани от координатните оси X'X и Y'Y, се наричат координатни ъгли (виж фиг. 1).
Позицията на точка А в равнината се определя от две координати x и y. Координатата x е равна на дължината на отсечката OB, координатата y е равна на дължината на отсечката OC в избраните мерни единици. Сегментите OB и OC се определят от линии, начертани от точка А, успоредни съответно на осите Y'Y и X'X. Координатата x се нарича абциса на точка A, координатата y се нарича ордината на точка A. Записва се по следния начин: A(x, y).
Ако точка А лежи в координатен ъгъл I, тогава точка А има положителна абсциса и ордината. Ако точка А лежи в координатен ъгъл II, тогава точка А има отрицателна абциса и положителна ордината. Ако точка А лежи в координатен ъгъл III, тогава точка А има отрицателна абциса и ордината. Ако точка А лежи в координатен ъгъл IV, тогава точка А има положителна абциса и отрицателна ордината.
Правоъгълна координатна система в пространствотосе образува от три взаимно перпендикулярни координатни оси OX, OY и OZ. Координатните оси се пресичат в точка O, която се нарича начало, на всяка ос е избрана положителна посока, обозначена със стрелки, и мерна единица за сегментите на осите. Мерните единици са еднакви за всички оси. OX - абсцисната ос, OY - ординатната ос, OZ - апликативната ос. Положителната посока на осите е избрана така, че когато оста OX се завърти обратно на часовниковата стрелка на 90°, нейната положителна посока съвпада с положителната посока на оста OY, ако това въртене се наблюдава от положителната посока на оста OZ. Такава координатна система се нарича дясна. Ако палец дясна ръкавземете посоката X като посока X, индексната като посока Y и средната като посока Z, тогава се формира дясна координатна система. Подобни пръсти на лявата ръка образуват лявата координатна система. Невъзможно е да се комбинират дясната и лявата координатна система, така че съответните оси да съвпадат (виж фиг. 2).

Положението на точка А в пространството се определя от три координати x, y и z. Координатата x е равна на дължината на сегмента OB, координатата y е дължината на сегмента OC, координатата z е дължината на сегмента OD в избраните мерни единици. Отсечките OB, OC и OD се определят от равнини, начертани от точка A, успоредни съответно на равнините YOZ, XOZ и XOY. Координатата x се нарича абсцисата на точка A, координатата y се нарича ордината на точка A, координатата z се нарича апликация на точка A. Записва се по следния начин: A(a, b, c).
Орти
Правоъгълна координатна система (с всякакво измерение) също се описва от набор от единични вектори, подравнени с координатните оси. Броят на единичните вектори е равен на размерността на координатната система и всички те са перпендикулярни един на друг.
В тримерния случай обикновено се означават такива единични вектори аз й кили дх дг д z. В този случай, в случай на дясна координатна система, са валидни следните формули с векторно произведение на вектори:
- [аз й]=к ;
- [й к]=аз ;
- [к аз]=й .
История
Правоъгълната координатна система е въведена за първи път от Рене Декарт в неговия труд „Беседа за метода“ през 1637 г. Следователно правоъгълната координатна система се нарича още - Декартова координатна система. Координатният метод за описание на геометрични обекти бележи началото на аналитичната геометрия. Пиер Ферма също допринася за развитието на координатния метод, но неговите трудове са публикувани за първи път след смъртта му. Декарт и Ферма са използвали координатния метод само на равнината.
Координатният метод за триизмерно пространство е използван за първи път от Леонхард Ойлер още през 18 век.
Вижте също
Връзки
Фондация Уикимедия. 2010 г.
Вижте какво е „декартова координатна система“ в други речници:
КАРТЕЗИАНСКА КООРДИНАТНА СИСТЕМА, праволинейна координатна система на равнина или в пространството (обикновено с взаимно перпендикулярни оси и еднакви мащаби по осите). Кръстен на Р. Декарт (виж DESCARTES Рене). Декарт пръв представя... енциклопедичен речник
ДЕКАРТОВА КООРДИНАТНА СИСТЕМА- правоъгълна координатна система в равнина или в пространството, в която мащабите по осите са еднакви и координатните оси са взаимно перпендикулярни. Д. с. К. се означава с буквите x:, y за точка в равнина или x, y, z за точка в пространството. (См.… …
КАРТЕЗИАНСКА КООРДИНАТНА СИСТЕМА, система, въведена от Рене ДЕКАРТ, в която положението на точка се определя от разстоянието от нея до взаимно пресичащите се линии (оси). В най-простата версия на системата осите (означени с x и y) са перпендикулярни.... ... Научно-технически енциклопедичен речник
Декартова координатна система
Праволинейна координатна система (виж Координати) в равнина или в пространството (обикновено с еднакви мащаби по осите). Самият Р. Декарт в "Геометрия" (1637) използва само координатна система на равнина (като цяло, наклонена). Често… … Велика съветска енциклопедия
Набор от дефиниции, който прилага метода на координатите, т.е. начин за определяне на позицията на точка или тяло с помощта на числа или други символи. Наборът от числа, които определят позицията на определена точка, се наричат координати на тази точка. В... ... Уикипедия
картезианска система- Dekarto koordinačių sistema statusas T sritis fizika atitikmenys: англ. декартова система; Декартова система от координати vok. cartesisches Koordinatensystem, n; kartesisches Koordinatensystem, рус. Декартова система, f; Декартова система... ... Fizikos terminų žodynas
КООРДИНАТНА СИСТЕМА- набор от условия, които определят положението на точка на права линия, на равнина, в пространството. Има различни сферични форми: декартова, наклонена, цилиндрична, сферична, криволинейна и др. Линейни и ъглови величини, които определят позицията... ... Голяма политехническа енциклопедия
Ортонормирана праволинейна координатна система в евклидовото пространство. Д.п.с. на равнина се определя от две взаимно перпендикулярни прави координатни оси, на всяка от които е избрана положителна посока и сегмент от единицата ... Математическа енциклопедия
Правоъгълна координатна система е праволинейна координатна система с взаимно перпендикулярни оси в равнина или в пространството. Най-простата и следователно най-често използваната координатна система. Много лесно и директно обобщено за... ... Wikipedia
Книги
- Изчислителна динамика на флуидите. Теоретична основа. Учебник, Валерий Алексеевич Павловски, Дмитрий Владимирович Никущенко. Книгата е посветена на систематичното представяне теоретични основиза поставяне на задачи математическо моделиранепотоци от течности и газове. Особено внимание е отделено на въпросите за изграждането на...
Подредена система от две или три пресичащи се оси, перпендикулярни една на друга с общо начало (начало на координатите) и обща единица за дължина, се нарича правоъгълна декартова координатна система .
Обща декартова координатна система (афинна координатна система) не е задължително да включва перпендикулярни оси. В чест на френския математик Рене Декарт (1596-1662) е наречена точно такава координатна система, в която по всички оси се измерва обща единица за дължина и осите са прави.
Правоъгълна декартова координатна система на равнина има две оси и правоъгълна декартова координатна система в пространството - три оси. Всяка точка в равнината или в пространството се определя от подреден набор от координати - числа, съответстващи на единицата за дължина на координатната система.
Имайте предвид, че както следва от определението, има декартова координатна система на права линия, тоест в едно измерение. Въвеждането на декартови координати върху права е един от начините, по който всяка точка от правата се свързва с точно дефинирано реално число, тоест координата.
Координатният метод, възникнал в трудовете на Рене Декарт, бележи революционно преструктуриране на цялата математика. Стана възможно тълкуването алгебрични уравнения(или неравенства) под формата на геометрични изображения (графики) и, обратно, търсят решения на геометрични задачи с помощта на аналитични формули и системи от уравнения. Да, неравенство z < 3 геометрически означает полупространство, лежащее ниже плоскости, параллельной координатной плоскости xOyи разположен над тази равнина с 3 единици.
Използвайки декартовата координатна система, принадлежността на точка към дадена крива съответства на факта, че числата хИ гудовлетворяват някакво уравнение. И така, координатите на точка от окръжност с център в дадена точка (а; b) отговарят на уравнението (х - а)² + ( г - b)² = Р² .
Правоъгълна декартова координатна система на равнина
Образуват две перпендикулярни оси на равнина с общо начало и еднаква мащабна единица Декартова правоъгълна координатна система на равнината . Една от тези оси се нарича ос вол, или ос х , другата - оста Ой, или у-ос . Тези оси се наричат още координатни оси. Нека означим с МхИ Мгсъответно проекцията на произволна точка Мпо оста волИ Ой. Как да получите прогнози? Да минем през точката М вол. Тази права линия пресича оста волв точката Мх. Да минем през точката Мправа линия, перпендикулярна на оста Ой. Тази права линия пресича оста Ойв точката Мг. Това е показано на снимката по-долу.
хИ гточки Мсъответно ще наричаме стойностите на насочените сегменти ОМхИ ОМг. Стойностите на тези насочени сегменти се изчисляват съответно като х = х0 - 0 И г = г0 - 0 . Декартови координати хИ гточки М абсцисата И ордината . Фактът, че точката Мима координати хИ г, се обозначава по следния начин: М(х, г) .
Координатните оси разделят равнината на четири квадрант , чиято номерация е показана на фигурата по-долу. Той също така показва разположението на знаците за координатите на точките в зависимост от тяхното местоположение в определен квадрант.
В допълнение към декартовите правоъгълни координати в равнина често се разглежда и полярната координатна система. За метода на преход от една координатна система към друга - в урока полярна координатна система .

Правоъгълна декартова координатна система в пространството
Декартовите координати в пространството са въведени в пълна аналогия с декартовите координати в равнината.
Три взаимно перпендикулярни оси в пространството (координатни оси) с общо начало Ои с една и съща мащабна единица, която образуват Декартова правоъгълна координатна система в пространството .
Една от тези оси се нарича ос вол, или ос х , другата - оста Ой, или у-ос , третата - ос Оз, или прилагане на ос . Позволявам Мх, Мг Мz- проекции на произволна точка Мпространство по оста вол , ОйИ Озсъответно.
Да минем през точката М волволв точката Мх. Да минем през точката Мравнина, перпендикулярна на оста Ой. Тази равнина пресича оста Ойв точката Мг. Да минем през точката Мравнина, перпендикулярна на оста Оз. Тази равнина пресича оста Озв точката Мz.
Декартови правоъгълни координати х , гИ zточки Мсъответно ще наричаме стойностите на насочените сегменти ОМх, ОМгИ ОМz. Стойностите на тези насочени сегменти се изчисляват съответно като х = х0 - 0 , г = г0 - 0 И z = z0 - 0 .
Декартови координати х , гИ zточки Мсе наричат съответно абсцисата , ордината И прилагам .
Координатните оси, взети по двойки, са разположени в координатни равнини xOy , yOzИ zOx .
Задачи за точки в декартова координатна система
Пример 1.
А(2; -3) ;
б(3; -1) ;
° С(-5; 1) .
Намерете координатите на проекциите на тези точки върху абсцисната ос.
Решение. Както следва от теоретичната част на този урок, проекцията на точка върху абсцисната ос е разположена върху самата абсцисна ос, т.е. вол, и следователно има абциса, равна на абсцисата на самата точка, и ордината (координата на оста Ой, която оста x пресича в точка 0), която е равна на нула. Така че получаваме следните координати на тези точки по оста x:
Аx(2;0);
бx(3;0);
° Сx (-5; 0).
Пример 2.В декартовата координатна система точките са дадени на равнината
А(-3; 2) ;
б(-5; 1) ;
° С(3; -2) .
Намерете координатите на проекциите на тези точки върху ординатната ос.
Решение. Както следва от теоретичната част на този урок, проекцията на точка върху ординатната ос се намира на самата ординатна ос, т.е. Ой, и следователно има ордината, равна на ординатата на самата точка, и абсциса (координата на оста вол, която ординатната ос пресича в точка 0), която е равна на нула. Така че получаваме следните координати на тези точки на ординатната ос:
Аy(0;2);
бy(0;1);
° Сy(0;-2).
Пример 3.В декартовата координатна система точките са дадени на равнината
А(2; 3) ;
б(-3; 2) ;
° С(-1; -1) .
вол .
вол вол вол, ще има същата абциса като дадената точка и ордината, равна по абсолютна стойност на ординатата на дадената точка и противоположна по знак. Така че получаваме следните координати на точки, симетрични на тези точки спрямо оста вол :
а"(2; -3) ;
Б"(-3; -2) ;
° С"(-1; 1) .
Решете сами задачи, като използвате декартовата координатна система, и след това разгледайте решенията
Пример 4.Определете в кои квадранти (четвърти, чертеж с квадранти - в края на параграфа „Правоъгълна декартова координатна система в равнина“) може да бъде разположена точка М(х; г) , Ако
1) xy > 0 ;
2) xy < 0 ;
3) х − г = 0 ;
4) х + г = 0 ;
5) х + г > 0 ;
6) х + г < 0 ;
7) х − г > 0 ;
8) х − г < 0 .
Пример 5.В декартовата координатна система точките са дадени на равнината
А(-2; 5) ;
б(3; -5) ;
° С(а; b) .
Намерете координатите на точки, симетрични на тези точки спрямо оста Ой .
Нека продължим да решаваме проблемите заедно
Пример 6.В декартовата координатна система точките са дадени на равнината
А(-1; 2) ;
б(3; -1) ;
° С(-2; -2) .
Намерете координатите на точки, симетрични на тези точки спрямо оста Ой .
Решение. Завъртане на 180 градуса около оста Ойнасочен сегмент от оста Ойдо този момент. На фигурата, където са посочени квадрантите на равнината, виждаме, че точката, симетрична на дадената спрямо оста Ой, ще има същата ордината като дадената точка и абциса, равна по абсолютна стойност на абсцисата на дадената точка и противоположна по знак. Така че получаваме следните координати на точки, симетрични на тези точки спрямо оста Ой :
а"(1; 2) ;
Б"(-3; -1) ;
° С"(2; -2) .
Пример 7.В декартовата координатна система точките са дадени на равнината
А(3; 3) ;
б(2; -4) ;
° С(-2; 1) .
Намерете координатите на точки, симетрични на тези точки спрямо началото.
Решение. Завъртаме насочената отсечка от началото до дадената точка на 180 градуса около началото. На фигурата, където са посочени квадрантите на равнината, виждаме, че точка, симетрична на дадената точка спрямо началото на координатите, ще има абциса и ордината, равни по абсолютна стойност на абсцисата и ординатата на дадената точка, но противоположни по знак. Така че получаваме следните координати на точки, симетрични на тези точки спрямо началото:
а"(-3; -3) ;
Б"(-2; 4) ;
° С(2; -1) .
Пример 8.
А(4; 3; 5) ;
б(-3; 2; 1) ;
° С(2; -3; 0) .
Намерете координатите на проекциите на тези точки:
1) в самолет Окси ;
2) в самолет Oxz ;
3) до самолета Ойз ;
4) по абсцисната ос;
5) по ординатната ос;
6) по оста на приложението.
1) Проекция на точка върху равнина Оксисе намира на самата тази равнина и следователно има абциса и ордината, равни на абсцисата и ординатата на дадена точка, и апликат, равен на нула. Така че получаваме следните координати на проекциите на тези точки върху Окси :
Аxy (4; 3; 0);
бxy (-3; 2; 0);
° Сxy(2;-3;0).
2) Проекция на точка върху равнина Oxzсе намира на самата тази равнина и следователно има абциса и апликат, равни на абсцисата и апликат на дадена точка, и ордината, равна на нула. Така че получаваме следните координати на проекциите на тези точки върху Oxz :
Аxz (4; 0; 5);
бxz (-3; 0; 1);
° Сxz (2; 0; 0).
3) Проекция на точка върху равнина Ойзсе намира на самата тази равнина и следователно има ордината и апликат, равни на ординатата и апликат на дадена точка, и абциса, равна на нула. Така че получаваме следните координати на проекциите на тези точки върху Ойз :
Аyz(0; 3; 5);
бyz (0; 2; 1);
° Сyz (0; -3; 0).
4) Както следва от теоретичната част на този урок, проекцията на точка върху абсцисната ос е разположена върху самата абсцисна ос, т.е. оста вол, и следователно има абциса, равна на абсцисата на самата точка, а ординатата и апликата на проекцията са равни на нула (тъй като ординатната и апликативната ос пресичат абсцисата в точка 0). Получаваме следните координати на проекциите на тези точки върху абсцисната ос:
Аx(4;0;0);
бx (-3; 0; 0);
° Сx(2;0;0).
5) Проекцията на точка върху ординатната ос се намира на самата ординатна ос, т.е. Ой, и следователно има ордината, равна на ординатата на самата точка, а абсцисата и апликата на проекцията са равни на нула (тъй като абсцисната и апликативната ос пресичат ординатната ос в точка 0). Получаваме следните координати на проекциите на тези точки върху ординатната ос:
Аy(0; 3; 0);
бy (0; 2; 0);
° Сy(0;-3;0).
6) Проекцията на точка върху оста на приложението се намира върху самата ос на приложението, т.е. Оз, и следователно има апликат, равен на апликата на самата точка, а абсцисата и ординатата на проекцията са равни на нула (тъй като абсцисната и ординатната оси пресичат апликативната ос в точка 0). Получаваме следните координати на проекциите на тези точки върху оста на приложението:
Аz (0; 0; 5);
бz (0; 0; 1);
° Сz(0; 0; 0).
Пример 9.В декартовата координатна система точките са дадени в пространството
А(2; 3; 1) ;
б(5; -3; 2) ;
° С(-3; 2; -1) .
Намерете координатите на точките, симетрични на тези точки по отношение на:
1) самолет Окси ;
2) самолети Oxz ;
3) самолети Ойз ;
4) абсцисни оси;
5) ординатни оси;
6) прилагане на оси;
7) начало на координатите.
1) „Преместете“ точката от другата страна на оста Окси Окси, ще има абциса и ордината, равни на абсцисата и ординатата на дадена точка, и апликат, равен по величина на апликата на дадена точка, но противоположен по знак. И така, получаваме следните координати на точки, симетрични на данните спрямо равнината Окси :
а"(2; 3; -1) ;
Б"(5; -3; -2) ;
° С"(-3; 2; 1) .
2) „Преместете“ точката от другата страна на оста Oxzна същото разстояние. От фигурата, показваща координатното пространство, виждаме, че точка, симетрична на дадена спрямо оста Oxz, ще има абсциса и апликат, равни на абсцисата и апликат на дадена точка, и ордината, равна по големина на ординатата на дадена точка, но противоположен по знак. И така, получаваме следните координати на точки, симетрични на данните спрямо равнината Oxz :
а"(2; -3; 1) ;
Б"(5; 3; 2) ;
° С"(-3; -2; -1) .
3) „Преместете“ точката от другата страна на оста Ойзна същото разстояние. От фигурата, показваща координатното пространство, виждаме, че точка, симетрична на дадена спрямо оста Ойз, ще има ордината и апликата, равни на ординатата и апликата на дадена точка, и абсциса, равна по стойност на абсцисата на дадена точка, но противоположни по знак. И така, получаваме следните координати на точки, симетрични на данните спрямо равнината Ойз :
а"(-2; 3; 1) ;
Б"(-5; -3; 2) ;
° С"(3; 2; -1) .
По аналогия със симетрични точки на равнина и точки в пространството, които са симетрични на данни спрямо равнини, отбелязваме, че в случай на симетрия по отношение на някаква ос на декартовата координатна система в пространството, координатата на оста по отношение на на която е дадена симетрията, ще запази знака си, а координатите по другите две оси ще бъдат еднакви по абсолютна стойност с координатите на дадена точка, но противоположни по знак.
4) Абсцисата ще запази знака си, но ординатата и апликата ще сменят знака си. И така, получаваме следните координати на точки, симетрични на данните спрямо абсцисната ос:
а"(2; -3; -1) ;
Б"(5; 3; -2) ;
° С"(-3; -2; 1) .
5) Ординатата ще запази знака си, но абсцисата и апликата ще сменят знака. И така, получаваме следните координати на точки, симетрични на данните спрямо ординатната ос:
а"(-2; 3; -1) ;
Б"(-5; -3; -2) ;
° С"(3; 2; 1) .
6) Приложението ще запази знака си, но абсцисата и ординатата ще сменят знака си. И така, получаваме следните координати на точки, симетрични на данните спрямо приложената ос:
а"(-2; -3; 1) ;
Б"(-5; 3; 2) ;
° С"(3; -2; -1) .
7) По аналогия със симетрията в случай на точки в равнина, в случай на симетрия относно началото на координатите, всички координати на точка, симетрична на дадена, ще бъдат равни по абсолютна стойност на координатите на дадена точка, но противоположни на тях по знак. И така, получаваме следните координати на точки, симетрични на данните спрямо началото.
), с помощта на които се определя положението на светилата и спомагателните точки на небесната сфера. В астрономията се използват различни небесни координатни системи. Всяка от тях е по същество сферична координатна система (без радиална координата) с подходящо избрана фундаментална равнина и начало. В зависимост от избора на фундаментална равнина, небесната координатна система се нарича хоризонтална (равнина на хоризонта), екваториална (равнина на екваториала), еклиптика (равнина на еклиптиката) или галактична (равнина на галактиката).
Координатите в равнината и в пространството могат да се въвеждат безкрайно много различни начини. Когато решавате конкретен математически или физически проблем с помощта на координатния метод, можете да използвате различни координатни системи, като изберете тази, в която проблемът се решава по-лесно или по-удобно в конкретния случай. Добре известно обобщение на координатните системи са референтните системи и референтните системи.
Енциклопедичен YouTube
1 / 5
Модел на декартова координатна система.
Геометрия 11 клас - Правоъгълна координатна система в пространството
Координатна равнина ➽ Алгебра 7 клас ➽ Видео урок
Видео урок "Полярна координатна система"
Правоъгълна координатна система в пространството. Векторни координати. Видео урок по геометрия 11 клас
субтитри
Основни системи
Този раздел предоставя обяснения за най-често използваните координатни системи в елементарната математика.
Декартови координати
Местоположение на точката Пна самолета се определя Декартови координатиизползвайки няколко числа (x, y) : (\displaystyle (x,y):)
В космоса вече имате нужда от 3 координати (x, y, z) : (\displaystyle (x,y,z):)
Полярни координати
IN полярна координатна система, нанесен върху равнината, позицията на точката Псе определя от разстоянието му до началото r= |OP| и ъгълът φ на неговия радиус вектор спрямо оста вол .
В космоса се използват обобщения на полярните координати - цилиндричнаИ сферичнакоординатни системи.
Цилиндрични координати
Цилиндрични координати- триизмерен аналог на полярните, в който точката Пизглежда подредена тройка (r , φ , z) . (\displaystyle (r,\varphi,z).)
Забележка: в литературата обозначението ρ понякога се използва за първата (радиална) координата, обозначението θ за втората (ъглова или азимутална) координата и обозначението θ за третата координата ч .Полярните координати имат един недостатък: стойността на φ не се определя кога r = 0 .
Цилиндричните координати са полезни за изучаване на системи, които са симетрични спрямо някаква ос. Например дълъг цилиндър с радиус Рв декартови координати (с ос z, съвпадащ с оста на цилиндъра) има уравнението x 2 + y 2 = R 2 , (\displaystyle x^(2)+y^(2)=R^(2),)докато в цилиндрични координати изглежда много по-просто, като r = Р .
Сферични координати
Сферични координати- триизмерен аналог на полярните.
В сферичната координатна система местоположението на точка е Псе определя от три компонента: (ρ, φ, θ) . (\displaystyle (\rho,\varphi,\theta).)По отношение на декартовата координатна система,
Забележка: В литературата азимутът понякога се означава с θ, а полярният ъгъл с φ. Понякога се използва за радиална координата rвместо ρ. В допълнение, диапазонът от ъгли за азимута може да бъде избран като (−180°, +180°] вместо диапазон, а не диапазон. Понякога редът на координатите в тройката е избран различен от описания; за например полярният и азимутният ъгъл могат да се разменят.Сферичната координатна система също има недостатък: φ и θ не са определени, ако ρ = 0; Ъгълът φ също не е дефиниран за граничните стойности θ = 0 и θ = 180° (или за θ = ±90°, ако е приет подходящият диапазон за този ъгъл).
Да начертая точка Пспоред неговите сферични координати е необходимо от полюса по положителната полуос zотделете сегмент, равен на ρ, завъртете го на ъгъл θ около оста г х, и след това се завърта на ъгъл θ около оста zпо посока на положителната полуос г .
Сферичните координати са полезни при изучаване на системи, които са симетрични спрямо точка. Така уравнението на сфера с радиус Рв декартови координати с начало в центъра на сферата изглежда така x 2 + y 2 + z 2 = R 2 , (\displaystyle x^(2)+y^(2)+z^(2)=R^(2),)докато в сферичните координати става много по-просто: ρ = R. (\displaystyle \rho =R.)
Други често срещани координатни системи
- Афинна (наклонена) координатна система- праволинейна координатна система в афинното пространство. На равнината се определя от началната точка на координатите ОТНОСНОи два подредени неколинеарни вектора, които представляват афинна основа. В този случай координатните оси са прави линии, минаващи през началната точка, успоредни на базисните вектори, които от своя страна определят положителната посока на осите. Съответно в триизмерното пространство една афинна координатна система се определя от тройка от линейно независими вектори и началната точка. За определяне на координатите на определена точка Мизчисляват се векторни коефициенти на разширение ОМчрез базисни вектори.
- Барицентрични координатиса въведени за първи път през 1827 г. от А. Мобиус, който решава проблема за центъра на тежестта на маси, разположени във върховете на триъгълник. Те са афинни инварианти и представляват специален случайобщи хомогенни координати. Точката с барицентрични координати се намира на н-дименсионално векторно пространство E n, а самите координати се отнасят до фиксирана система от точки, които не лежат в ( н−1)-мерно подпространство. Барицентричните координати се използват и в алгебричната топология по отношение на симплексни точки.
- Двуъгълни координати- специален случай на бицентрични координати, координатна система в равнина, определена от две фиксирани точки СЪС 1 и СЪС 2, през която е прекарана права линия, изпълняваща ролята на абсцисната ос. Позиция на някаква точка П, която не лежи на тази права, се определя от ъглите настолен компютър 1 ° С 2 и настолен компютър 2 ° С 1 .
- Биполярни координатисе характеризират с това, че в този случай две семейства окръжности с полюси действат като координатни линии на равнината АИ б, както и семейство от окръжности, ортогонални на тях. Преобразуването на биполярни координати в декартови правоъгълни координати се извършва с помощта на специални формули. Биполярните координати в пространството се наричат бисферични; в този случай координатните повърхности са сфери, повърхности, образувани от въртенето на кръгови дъги, както и полуравнини, минаващи през оста O z .
- Бицентрични координати- всяка координатна система, която се основава на две фиксирани точкии в рамките на който положението на някоя друга точка се определя, като правило, от степента на нейното отстраняване или, като цяло, от нейното положение спрямо тези две основни точки. Системи от този вид могат да бъдат доста полезни в определени области научно изследване.
- Бицилиндрични координати- координатна система, която се образува, ако биполярна координатна система на равнина Оксиуспоредна на оста O z. В този случай координатните повърхности са семейство от двойки кръгови цилиндри, чиито оси са успоредни, семейство от кръгови цилиндри, ортогонални на тях, както и равнина. За преобразуване на бицилиндрични координати в декартови правоъгълни координати за триизмерно пространство се използват и специални формули.
- Конични координати- триизмерна ортогонална координатна система, състояща се от концентрични сфери, които се описват от техния радиус, и две семейства перпендикулярни конуси, разположени по осите хИ z .
- Координатите на Риндлърсе използват основно в рамките на теорията на относителността и описват онази част от плоското пространство-време, която обикновено се нарича пространство на Минковски. В специалната теория на относителността една равномерно ускоряваща се частица е в хиперболично движение и за всяка такава частица в координатите на Риндлер може да бъде избрана отправна точка, спрямо която тя е в покой.
- Параболични координатие двумерна ортогонална координатна система, в която координатните линии са набор от конфокални параболи. Триизмерна модификация на параболични координати се конструира чрез завъртане на двуизмерна система около оста на симетрия на тези параболи. Параболичните координати също имат определен набор от потенциални практически приложения: по-специално те могат да се използват във връзка с ефекта на Старк. Параболичните координати са свързани по определен начин с правоъгълните декартови координати.
- Проективни координатисъществуват, според името, в проективното пространство P н (ДА СЕ) и представляват едно към едно съответствие между неговите елементи и класове от крайни подмножества от елементи на тялото ДА СЕ, характеризиращ се със свойствата на еквивалентност и подреденост. За да се определят проективните координати на проективните подпространства, е достатъчно да се определят съответните координати на точките в проективното пространство. В общия случай, спрямо някакъв базис, проективните координати се въвеждат с чисто проективни средства.
- Тороидална координатна система- триизмерна ортогонална координатна система, получена чрез завъртане на двумерна биполярна координатна система около оста, разделяща нейните два фокуса. Фокусите на биполярната система съответно се превръщат в пръстен с радиус А, лежащ в самолет xyтороидална координатна система, докато ос zстава ос на въртене на системата. Фокалният пръстен също понякога се нарича основен кръг.
- Трилинейни координатиса един от примерите за хомогенни координати и се основават на даден триъгълник, така че позицията на определена точка се определя спрямо страните на този триъгълник - главно от степента на разстояние от тях, въпреки че са възможни и други варианти. Трилинейните координати могат да бъдат преобразувани в барицентрични координати относително лесно; освен това те са конвертируеми и в двумерни правоъгълни координати, за което се използват съответните формули.
- Цилиндрични параболични координати- триизмерна ортогонална координатна система, получена в резултат на пространствена трансформация на двумерна параболична координатна система. Координатните повърхности, съответно, са конфокални параболични цилиндри. Цилиндричните параболични координати имат определена връзка с правоъгълните координати и могат да се използват в редица области на научни изследвания.
- Елипсоидални координати- елиптични координати в пространството. Координатните повърхности в този случай са елипсоиди, еднолистови хиперболоиди, както и двулистови хиперболоиди, центровете на които са разположени в началото. Системата е ортогонална. Всяка тройка числа, които са елипсоидални координати, съответства на осем точки, които са спрямо равнините на системата Oxyzсиметрични един спрямо друг.
Преход от една координатна система към друга
Декартово и полярно
Където u 0 - Функция Хевисайд с u 0 (0) = 0, (\displaystyle u_(0)(0)=0,)и sgn е функцията signum. Ето функциите u 0 и sgn се използват като "логически" превключватели, подобни по значение на изразите "if...else" в езиците за програмиране. Някои езици за програмиране имат специална функция atan2 ( г , х), който връща правилния φ в необходимия квадрант, определен от координатите хИ г .




